4. 次世代移動体通信ネットワーク (Beyond 5G/6G) に関する研究
4.1. B5G時代に向けたセルラーシステムの高度化に関する研究
4.1.1. 5G 通信技術のための小型移動基地局の実現に関する研究
近年の通信技術の発展に伴い、様々な分野で5G 移動体通信システムの利用が検討されているが、これらの取り組みでは、基地局を固定的に設置し、基地局から発する電波が届く範囲で通信端末が動くものとなっている。その一方で、移動型の基地局(以降、単に移動基地局と書く)を構築できれば、移動基地局を展開することで様々な活用形態が期待できる。例えば、商用の携帯通信ネットワークが利用できない山間部や離島などの非居住地域に基地局を配置することが可能になるほか、トンネルや高層建築物の建設現場など、通信が不可欠な状況においても活用できる。また、イベントなどの人口密集環境では、群衆の移動や一時的な障害物の発生により通信品質が低下し、安定した接続を維持することも期待される。
移動基地局が複数の通信端末を収容する場合は、端末の通信品質の偏りが課題となる。これは、通信品質は単に移動基地局との距離によって定まるものではなく、反射波の量・影響などの様々な要因によっての変化するためである。しかし、移動基地局がエリア全体を詳細に測定し最も適切な位置に移動する移動制御は、観測に要する時間が増大し非現実的である。限られた観測データから端末の通信品質を高精度に推定し、動的な通信品質の変化を測定し推定することで、複数の端末間で通信品質に偏りが発生しない移動基地局の移動制御技術が求められる。
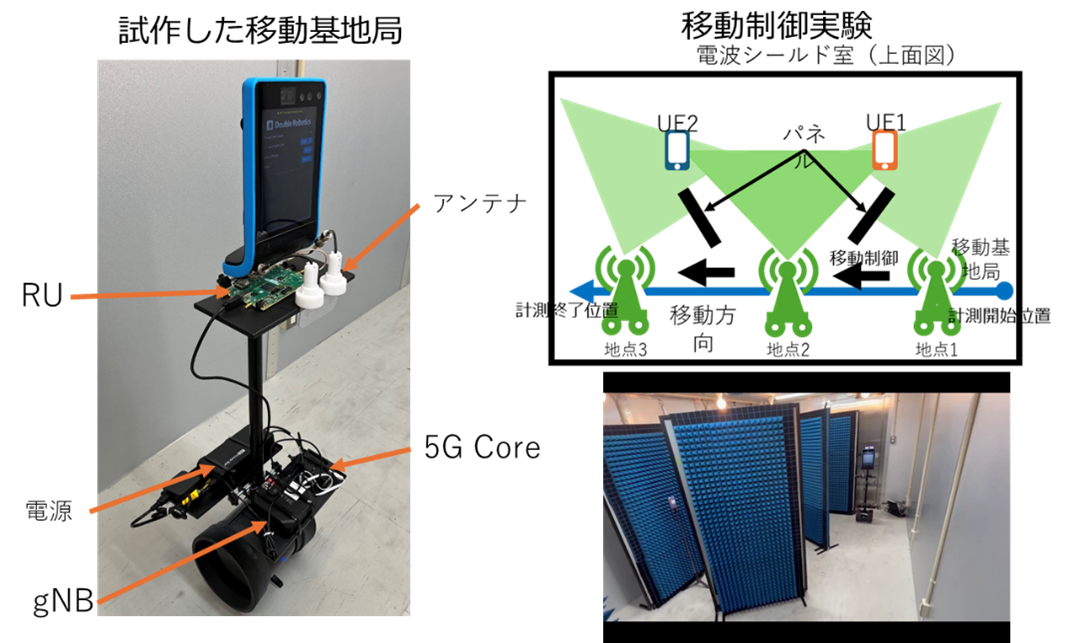
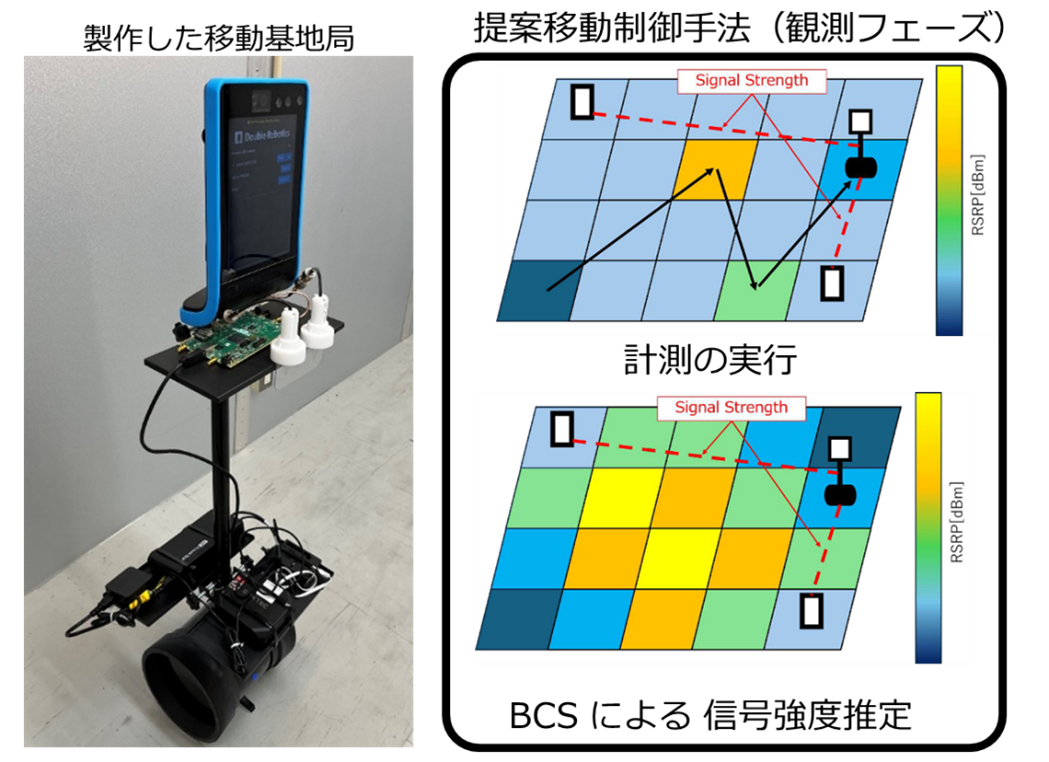
以下の研究では、複数の端末間で偏りのない通信品質を実現するための移動型基地局の移動制御手法を提案した+。ベイズ圧縮センシング(Bayesian Compressive Sensing, BCS)を活用し、限られた観測データから重畳信号マップ(Superimposed Signal Map, SSM)を構築することで、通信品質を向上させる最適な移動型基地局の配置を動的に決定する。評価の結果、提案手法によって通信品質が大幅に向上することが確認された。具体的には、受信信号強度(RSRP)の平均値が、2端末の場合に110.7 dBm、3端末の場合に80.9 dBm向上し、最も通信品質が低かった端末も大幅な改善が見られた。また、不確実性の低減は、2端末の場合7回の反復で、3端末の場合12回の反復で収束し、探索するグリッド数はそれぞれ24.7%、42.4%に削減された。さらに、視覚的な分析の結果、推定されたRSRP分布は実際の分布と高い一致を示し、移動型基地局は、2端末の場合は実際の最大RSRP地点から7グリッド以内、3端末の場合は4グリッド以内の位置に移動することが確認された。これにより、効果的な移動制御が実現できることが示された。
[関連発表論文]
- 荒川 伸一, “アバター共生社会実現に向けた無線・ネットワークの現状と課題.” 第五回電波利活用強靭化に向けた電波COE シンポジウム, 招待講演.
- Suyong Eum, Shin'ichi Arakawa and Masayuki Murata, “Deterministic and Probabilistic Scheduling for Latency Guarantees in B5G/6G Network Management,” submitted for publica-tion.
- Shin'ichi Arakawa, Field Experiments on Private 5G Communication Systems, ch. 8.3.2 of Cy-bernetic Avatar, pp. 284–290. Springer Singapore, November 2024.
- Yang Yu, “Proposal and evaluation of robot navigation methods utilizing radio wave simulators in a private 5G environment,” Master’s thesis, Graduate School of Information Science and Tech-nology, Osaka University, February 2025.
- Atsuhisa Hazama, “Proposal and evaluation of wireless signal mapping and navigation for mobile robotic cellular base stations,” Master’s thesis, Graduate School of Information Science and Technology, February 2025.
4.2. セルラーV2Xのための移動体通信サービスに関する研究
4.2.1. エッジコンピューティング技術を活用したセルラーV2Xにおける衝突検知手法に関する研究
エッジコンピューティングのユースの検討が国内外で進められている。その1つとして、車両や歩行者から局所的に得られる環境情報をデータセンターで収集・解析し、車両群へ安全性に関する情報をフィードバックすることで安全性を高めるITS(Intelligent Transport Systems)アプリケーションへの期待が高まっている。見通しの悪い交差点における衝突検知など、ITSアプリケーションの高度化のためには、車両の自律的な認知機能に加え、車両間で情報共有する機能や各車両で得られる情報を分析して活用する機能が不可欠である。そのため、セルラーシステム等を介して車両環境情報をエッジサーバ上に収集して解析し、車両に解析結果をフィードバックするC-V2Xシステムが注目されている。
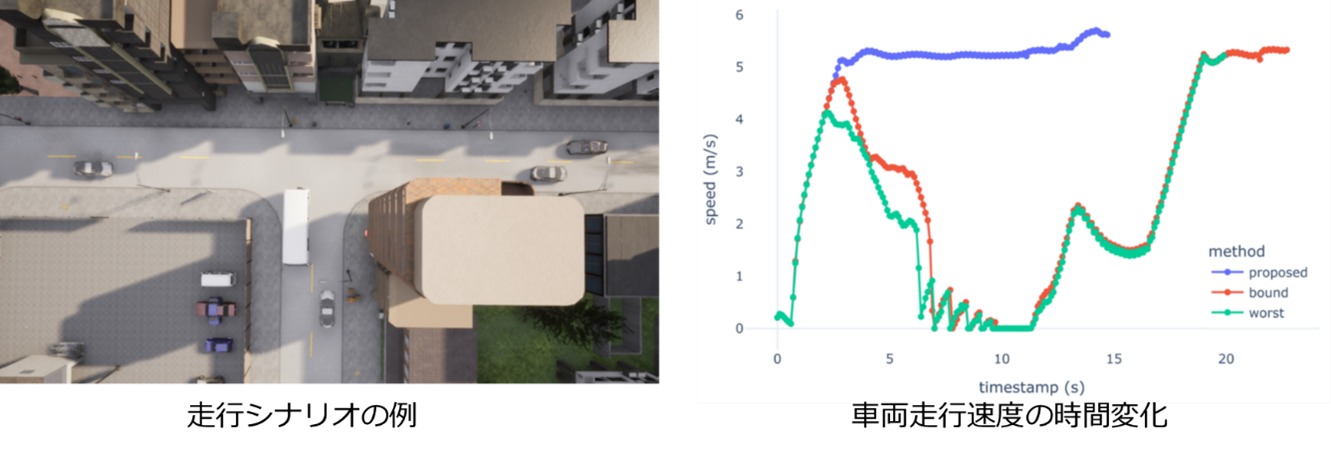
以下の研究では、Lidarセンサ情報に基づく3Dマルチオブジェクトトラッキング(MOT)手法を提案し、センサ情報の欠損による物体(移動車両)の検出漏れに対処し、かつ、ネットワーク遅延に起因する物体の位置と実際の位置の誤差を、過去の物体の移動軌跡に基づいて補正することでMOTの精度を向上している。さらに、車両等による遮蔽が頻繁に発生する都市環境において、安全かつ効率的なナビゲーションを両立することを目標とした協調知覚 (CP) による車両走行計画手法を提案した。提案手法では、車両はエッジ サーバを介してセンサーデータと周辺車両と共有する。各車両では、局所的に得られたセンサ情報を用いてオブジェクト追跡を実行しつつ、エッジサーバから受信した情報を使用して車両の視野内に表れる遮蔽領域を特定する。また、遮蔽領域に仮想上の走行車両であるファントムオブジェクトを生成し、潜在的な走行車両を含めた車両走行計画をシミュレートする。Carlaを拡張したシミュレーション評価により、車載センサのみに依存する車両走行計画と比較して、提案手法は走行停止時間が大幅に減少することがわかった。
- Hiroyuki Tsuda, Ryogo Kubo, Masayuki Iwase, Masahito Morimoto, Keisuke Kawahara, Daisuke Noguchi, Yasushi Amamiya, Yongwi Kim, Yoshiaki Nakano, Takuo Tanemura, Masayuki Murata and Shin'ichi Arakawa, “Demonstration of a highly reliable si-photonics-based in-vehicle optical network (SiPhON) for autonomous driving,” in Proceedings of the 50th European Conference on Optical Communications (ECOC), September 2024.
- Hao Su, Shin'ichi Arakawa and Masayuki Murata, “Cooperative 3D multi-object tracking for con-nected and automated vehicles with complementary data association,” in Proceedings of 2024 IEEE Intelligent Vehicles Symposium (IV), pp. 285–291, June 2024.
- Hao Su, Shin'ichi Arakawa and Masayuki Murata, “Occlusion-aware planning for connected and automated vehicles with cooperative perception at unsignalized intersection,” submitted for presentation.
- Hao Su, Shin'ichi Arakawa and Masayuki Murata, “Cooperative 3D multi-object tracking with cross-agent data association for connected and automated vehicles,” submitted for publication.
- Hao Su, Arakawa Shin'ichi and Masayuki Murata, “Enabling occlusion-aware trajectory planning for connected and automated vehicles: A geometric method based on occluded area tracking,” sub-mitted for publication.
4.3. 6G向け統合センシング・通信システム (ISAC: Integrated Sensing and Communication) に関する研究
4.3.1. 能動推論を用いた観測・制御ループ統合型ビームフォーミング制御に関する研究【2.1.3項再掲】
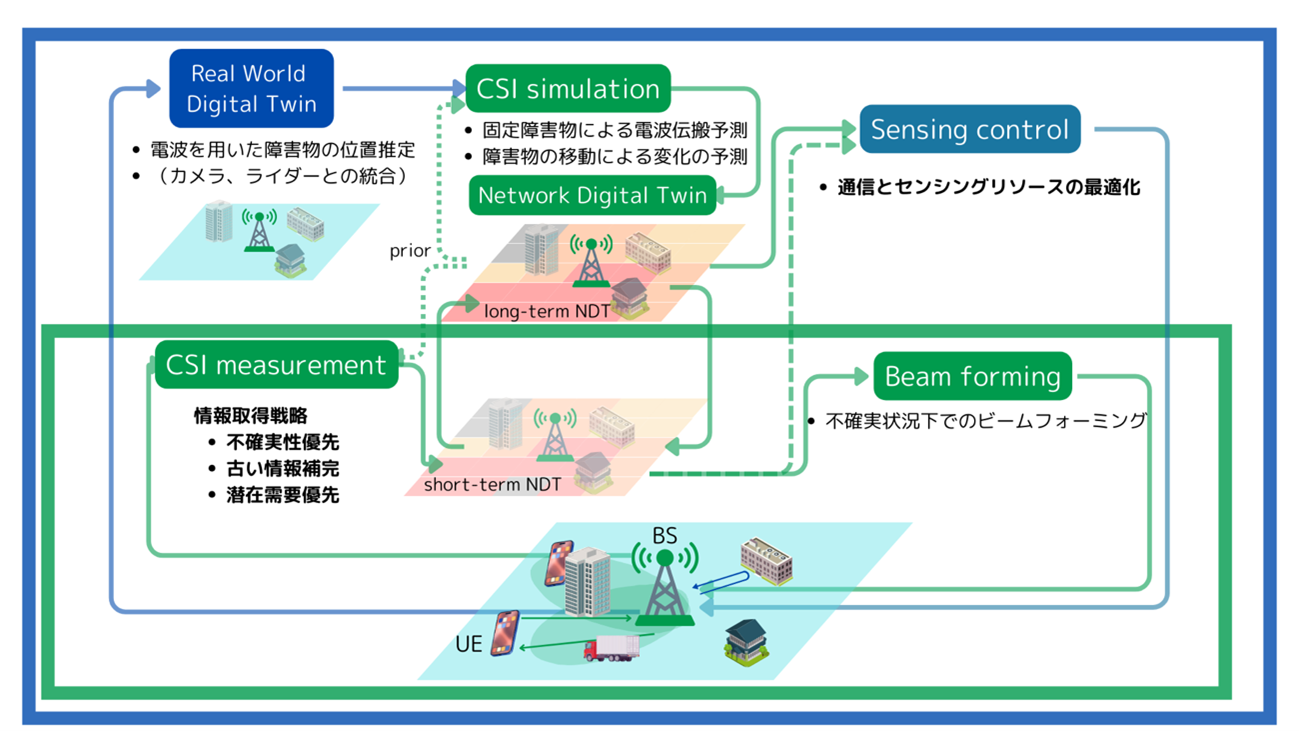
近年、電波による無線通信とセンシングを統合的に制御するIntegrated Sensing and Com-munication (ISAC)が注目されている。ISACでは同一周波数・同一ハードウェアを用いてセンシングと通信を同時に行う。従来のISACでは、センシングのアプリケーションと通信のアプリケーションは異なるものと想定されている。本研究では、センシング情報を通信におけるビームフォーミング制御に活用することで、センシングと統合されたビームフォーミング制御の実現を目指している。この統合のためには、常に変動する電波環境の中で、センシングによって環境の情報を正確に把握することによる間接的な制御性能の利得と、センシングのリソースを通信側に割くことによる直接的な制御性能の利得の双方を考慮した意思決定が必要となる。人の意思決定においても、状況を正確に知るための行動を行いながら行動の決定が行われるという能動推論が常に行われている。我々は、脳の能動推論との類似性に着目し、能動推論を応用することで、センシングと統合されたビームフォーミング制御を提案している。本研究では、受信電波強度のフィードバックをセンシング情報として、送信側でビームを能動推論により選択することで、環境変動に追随してビーム選択が可能であることを示した。また、受信電波の到達時間、反射電波の到達時間を用いた端末の位置推定をセンシング情報に加えたビームフォーミング制御への拡張も行なっており、位置情報を利用することでよりスループットの高いビーム制御が可能であることを示した。さらに計測用のドローンを利用して能動的に電波環境をセンシングすることで、人の動きに先立って適切なビームフォーミングを行うことが可能であることを示した。
[関連発表論文]
- Naoki Nishio, Tatsuya Otoshi and Masayuki Murata, “Predictive beamforming with active infer-ence in constant channel condition change,” submitted for publication.
- Tatsuya Otoshi and Masayuki Murata, “Coordinated multi-point by distributed hierarchical active inference with sensor feedback,” Computer Networks, vol. 257, p. 110989, February 2025.
- Naoki Nishio, Tatsuya Otoshi and Masayuki Murata, “Predictive beamforming with active infer-ence in hierarchical codebooks,” in Proceedings of 2024 20th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), pp. 563–569, October 2024.
- 大歳 達也, “能動的推論によるセンシングと通信の統合型ビームフォーミング制御,” 電子情報通信学会技術研究報告(IN2024-59), vol. 124, no. 312, pp. 26–29, December 2024.
- 山田 翔太, 大歳 達也, 村田 正幸, “位置情報を利用した能動推論による基地局間連携ビームフォーミング手法,” 電子情報通信学会技術研究報告(RCS2024-14), vol. 52, no. 124, pp. 1–6, May 2024.
- 橋本 悠平, “実時間ビームフォーミング実現のための能動推論を用いたネットワークデジタルツインの動的更新手法の検討,” 大阪大学基礎工学部情報科学科特別研究報告, February 2025.