2. IoT (Internet of Things)/M2M (Machine-to-Machine) ネットワークアーキテクチャに関する研究
2.1 センサーネットワークアーキテクチャに関する研究
2.1.1 自己組織的役割分担機構のネットワーク制御応用のための特性解析
多目的型センサーネットワークなど,タスクをノード間で分担,実施するシステムにおいては,通信環境や通信性能の変動などに応じた,自律分散的なタスク割当が必要となる.そのような自律分散,自己組織的な役割分担モデルとして,社会性昆虫における分業の仕組みの数理モデルである,反応閾値モデルがある.我々の研究グループでも,無線センサ・アクチュエータネットワークにおける動的なサービス構成のための反応閾値モデルを用いた適応的かつ効果的な端末選出機構を提案しており,その有効性を確認している.しかしながら,その適切なパラメータ設定は環境条件によって異なり,また,その適用領域も明らかにはなっていない.
そこで本研究では,ネットワーク制御の観点から反応閾値モデルの特性を分析し,情報の欠落が生じる環境において平衡状態が存在するための条件や,環境条件や制御パラメータが過渡的な挙動やノード故障からの回復時間に与える影響を解析的に検証した.

[関連発表論文]
- Takuya Iwai, Naoki Wakamiya and Masayuki Murata, “Analysis of response threshold model and its application for self-organizing network control,” in Proceedings of The 7th International Workshop on Self-Organizing Systems, LNCS 8221, pp. 27-38, May 2013.
2.1.2 自己組織型ネットワーク制御の収束性・適応性・安定性向上に関する検討
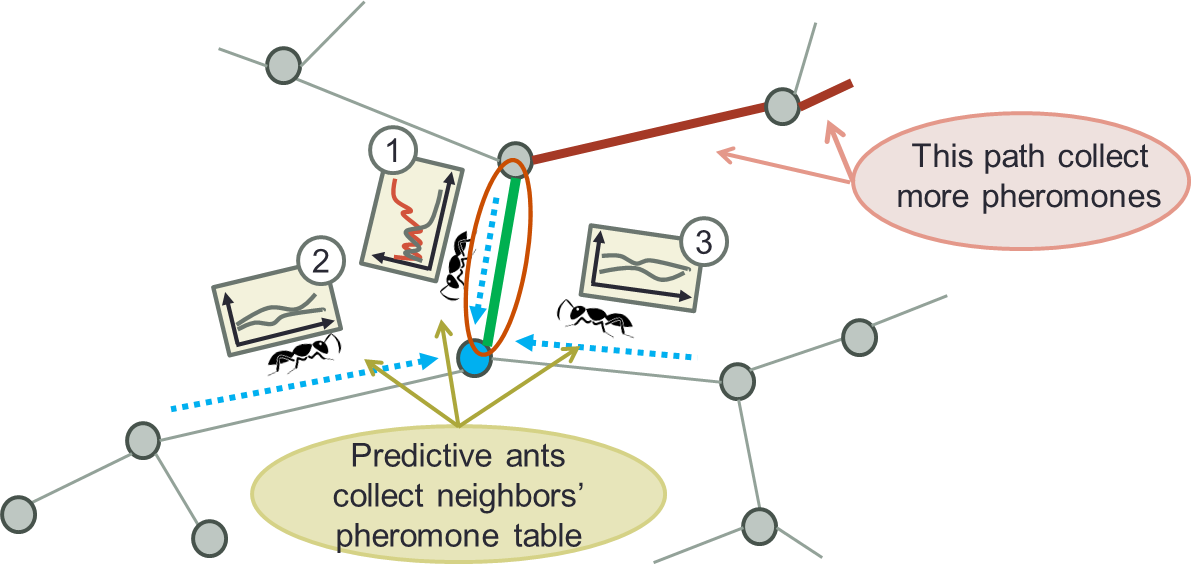
ネットワークのさらなる大規模化,複雑化によって顕在化する様々な問題に対応できる新たなネットワークシステムを構築するため,生物などにみられる自己組織化の仕組みを応用する手法が注目を集めている.自己組織型のシステムでは,局所的な情報を利用した簡単なルールに基づいて動作する構成要素が相互作用することによって,全体として望ましい機能や挙動が創発する.自己組織型のネットワーク制御技術は,拡張性,頑健性,適応性があることが示されているが,一方で,環境条件によっては局所界に陥る,収束性が低下する場合があることから,近年,制御された自己組織化の研究が行われるようになってきた.そこで,本研究では,アリの採餌行動に着想を得た経路制御手法 AntNet を題材に,大域情報を用いることなく,局所的な情報を元に自身の今後の振る舞いを予測し,予測先の結果に近づくような動作を行うことで,環境変動後に経路全体が安定するまでの収束時間を短縮する手法を提案した.シミュレーション評価により,単純な予測を行うことでも自己組織化が促進され,収束性が向上するとともに,より短い経路が得られることを示した.
[関連発表論文]
- Naomi Kuze, Naoki Wakamiya, Daichi Kominami, and Masayuki Murata, "Proposal and Evaluation of a Predictive Mechanism for Ant-based Routing," in Proceedings of the 5th International Conference on Emerging Network Intelligence (EMERGING 2013), pp. 7-12, September 2013.
2.1.3 大規模無線センサーネットワークにおける管理型自己組織化制御に基づくポテンシャルルーティング
無線センサーネットワークの課題の 1つにスケーラビリティの向上があり,これまでに局所情報に基づき自己の動作を決定する,自己組織化制御を用いた手法が研究されてきた.しかしながら完全な自己組織化制御に基づき動作するネットワークでは,ネットワークの規模が非常に大きくなったときに,ネットワーク全体の望ましい動作を管理することができない問題がある.そこで我々は管理型自己組織化制御に基づくポテンシャルルーティングを提案する.管理型自己組織化制御では,自己組織的に動作するノードの一部を集中制御などの方法で管理することで,自己組織化制御によって生ずる意図しない方向へのシステムの動作の遷移を防ぐ.マルチシンクを想定したネットワークを対象としたシミュレーション評価により,シンクノードの分布に偏りがある場合も,シンクノードの負荷を均一化できることを示す.さらに,センサーノードの中継負荷を分散することで最も負荷の高いセンサーノードの消費電力を抑制し,ネットワーク寿命を約 4 倍延長できることを示した.

[関連発表論文]
- Daichi Kominami, Masashi Sugano, Masayuki Murata and Takaaki Hatauchi, “Controlled and self-organized routing for large-scale wireless sensor networks,” ACM Transactions on Sensor Networks, vol. 10, no. 1, pp. 1-27, November 2013.
2.1.4 任意のノード間通信を実現するポテンシャルルーティング
無線センサーネットワークにおいては,多数のセンサーノードがセンシングしたデータをシンクノードに届けるための,センサーノードからシンクノードに対しての上り方向の通信を実現する手法は数多く存在する.一方で,シンクノードから特定の位置に存在するセンサーノードに対してクエリや特別な命令を送るという下り方向の通信に対する要求があるが,センサーネットワークのための多くのルーティング手法は,下り方向の通信に適用することができない.さらに IoT や M2M などの多様なトラフィックが想定される環境では,任意の二端末間の通信を実現することが必要となると考えられる.本研究では,下り方向の通信を実現するポテンシャルルーティングを提案した上で,上り方向のポテンシャルルーティングとシンクノードを介して組み合わせることで,任意のノード間における,省電力性,スケーラビリティ,頑強性,信頼性を満たす経路制御手法を実現した.

[関連発表論文]
- Shinya Toyonaga, Daichi Kominami, and Masayuki Murata, “Potential-based Routing for Supporting Robust Any-to-any Communication in Wireless Sensor Networks,” EURASIP Journal on Wireless Communications and Networking, vol. 2013, no. 1, pp. 1-13, December 2013.
2.1.5 制御時間スケールに着目した管理型自己組織化制御に基づくネットワークの設計手法
大規模複雑化が進む通信ネットワークのために,管理型自己組織化を原理としたネットワーク制御の研究がなされている.しかしながら,様々な応用に関する研究は進んでいるものの,この管理機能の具体的な設計手法については未検討の課題である.本研究では,制御時間スケールに着目して,管理型自己組織化制御に基づくネットワークを設計する方法について提案および評価を行った.アーキテクチャの階層ごとに適応すべき環境変動の周期が異なることを示し,それぞれについての設計指針を示した.計算機によるシミュレーションから,提案した設計指針に従い制御周期を決定することで環境変動に適応的な性能が得られることを示した.

[関連発表論文]
- Daichi Kominami, Masayuki Murata, “A design approach for controlled self-organization based sensor networks focused on control timescale,” International Journal of Distributed Sensor Networks, vol. 2013, pp. 1-8, April 2013.
2.1.6 無線センサーネットワークにおけるモバイルシンクを導入した高信頼情報収集機構
情報収集を行う無線センサーネットワークにおいて,多くの場合センサーノードの観測データを収集し,その観測データを利用者へ直接届けることが可能なシンクノードの配置が前提とされる.しかしながら,入念にノードの配置を決定するか,ある程度ノードの密度を高くするということを行わなければ,このようなシンクノードとセンサーノードの間の到達性は保証されない.例えばセンサーノードがセンシングしたデータを利用者に届けるために,長距離の通信を行えばこれは解決できるが,センサーノードの消費電力の増大を招き,ネットワークの長期運用が困難となる.本研究ではモバイルシンクの移動制御を用いてこの問題を解決する方法を考える.モバイルシンクがセンサーノードの送信する経路制御情報を傍受し,周囲のデータを一時的に集めているセンサーノード(プロキシノード)に誘導する移動制御手法を提案し,実機を用いた実験により評価を行った.実験により,モバイルシンクの移動制御によって,制御を行わない場合には到達できなかったプロキシノードへモバイルシンクが到達できることを示した.

[関連発表論文]
- Shinya Toyonaga, Yuki Fujita, Daichi Kominami and Masayuki Murata, “Implementation of controlled sink mobility strategies with a gradient field in wireless sensor networks,” in Proceedings of Interna-tional Conference on Sensor Technologies and Applications (SENSORCOMM 2013), (Barcelona, Spain), pp. 27?32, August 2013.
- 藤田勇希,小南大智,村田正幸,“センサーネットワークにおけるポテンシャル場を用いたモバイルシンク移動制御手法の提案と実装,”電子情報通信学会技術研究報告(IN2013-13), vol. 113, no. 36, pp. 7-12, May 2013.
2.1.7 モデル予測制御の自己組織型経路制御手法への応用
大規模なネットワークにおいて,局所情報に基づく局所決定がシステム全体の機能を創発する,自己組織化原理の有効性がこれまでに示されている.しかしながら,自己組織化制御の実現のためには,特にネットワークの規模が大きくなったときに,ネットワークの機能創発を制御できない,大域的な最適性が保証できない,変動後のシステム状態の収束に長時間を要する,など工学的応用上の重大な問題を解決する必要がある.本稿では自己組織型のシステムの例としてセンサーネットワークを想定し,ポテンシャルを用いた経路制御手法に対してモデル予測制御を加えた新たな制御フレームワークを考案し,収束速度の問題を解決する.ネットワークの外側から,ネットワーク内の情報を収集してフィードバック的に制御を与える管理ノードを導入し,与える制御入力を最適なものとすることで,収束速度の向上を図った.計算機シミュレーションにより,取得できる情報に誤差がある場合でも,制御を行わない場合と比べて収束速度を向上できることを示した.

[関連発表論文]
- 小南大智,加嶋健司,橋本智昭,村田正幸, “管理型自己組織化制御に基づくネットワークを目指したモデル予測制御を用いたポテンシャルルーティングの提案," 電子情報通信学会情報ネットワーク研究会, March 2014.
- 久世尚美,小南大智,加嶋健司,橋本智昭,村田正幸, “管理型自己組織化制御に基づくネットワークを目指したモデル予測制御を用いたポテンシャルルーティングの提案," 電子情報通信学会情報ネットワーク研究会, March 2014.
2.1.8 脳機能ネットワーク特性に着想を得た無線センサーネットワークのトポロジー構築手法
無線センサーネットワークにおいて多様な通信を収容するために,スモールワールドネットワークの特徴を持ったトポロジーを構築する方法がこれまでに考えられている.しかしながらこれまでに考えられている手法は,無線センサーネットワークで特に重要視される電力への考慮がほとんどなされていないものである.本研究では,人間の脳機能ネットワークが進化の過程でコストとネットワーク性能のバランスを調整してきた点に着目する.これらのバランスが,脳機能ネットワークの有するスモールワールド性およびモジュラリティという構造的特徴から得られるものと考え,この着想に基づいたトポロジー構築方法を提案する.提案手法により通信効率を向上しながらコストを抑制したトポロジーを構築できることを示したものの,構築されるトポロジーはハブとなるノードが存在することにより,単一故障が大きな影響を与える可能性を持つ.そこでハブとなるノードから隣接するノードにリンクを張り替えることで,提案手法によって得られる利点を大きく損なうことなく,この問題を解決できることも示した.

[関連発表論文]
- 石倉秀, “脳機能ネットワーク特性に着想を得た無線センサーネットワークのトポロジー制御手法の提案と評価,” 大坂大学基礎工学情部報科学科特別研究報告, February 2014.
2.1.9 脳機能ネットワークに着想を得たロバスト性を有する仮想ネットワーク構築手法
将来,無線センサーネットワーク(WSN)は,単に情報を収集するだけではなく,Internet of Thingsに統合された情報基盤としてその重要性を増していくと考えられている.しかしながら,複数のベンダーが設置する WSN は,互いに性能やプロトコルが不均質となることが考えられ,これらを共存させ統合することで大きな利点が得られると考えられる.WSN を統合するための重要な技術の一つに仮想化があり,ユーザには資源の提供という形で仮想化されたセンサーネットワークを提供する.様々な仮想化技術が提案されているものの,多様なトラフィック需要や仮想ノードの追加や削除などの環境変動についての考慮にまでは至っていない.将来の WSN はこのような多様な要求を満たす必要があるため,任意のスケールの WSN においても短い通信遅延や接続性を提供する仮想無線センサーネットワーク(VWSN)を構築することは重要な課題である.
本研究では,高い頑強性,通信効率,接続性を有することで知られている脳機能ネットワークに着想を得た VWSN 構築手法を提案する.これらの利点を得るために脳機能ネットワークが有するモジュール構造とスモールワールド性に着目し,VWSN のトポロジーにそれらの構造的特徴を導入する.シミュレーションによる評価から,既存のクラスタリング手法を元に構築したスモールワールドネットワークと比較し,提案手法で構築した VWSN トポロジーは接続性に対する頑強性と通信効率に対する頑強性が高いことを示した.

[関連発表論文]
- Shinya Toyonaga, “Configuring robust virtual wireless sensor networks for Internet of Things inspired by brain functional networks,” Master’s thesis, Graduate School of Information Science and Technology, Osaka University, February 2014.
2.1.10 無線センサーネットワークにおける受信電波強度に基づいた省電力情報伝播手法に関する研究
センサーネットワークの主な課題の一つに,消費電力の抑制がある.センサーネットワークの省電力化において,無線通信による電力消費を抑えることが重要である.定期的なメンテナンスを期待できない環境でバッテリーによって駆動するセンサーノードにとって,限られた電力資源を有効に活用しネットワークの稼働時間を延ばすためには,無線通信による電力消費を抑える事が重要となる. 本研究では,無線センサーネットワークにおける,消費電力を考慮した情報散布手法を提案した.提案手法は,フラッディング手法を基にした情報散布を行う.フラッディング手法は,新しい情報を受信したノードは,その情報を全ての隣接ノードへブロードキャスする一方,既に取得済みの情報を受信したノードは何も行わない.提案手法では,無線によりメッセージを受信したときの受信電力を用いて,メッセージのブロードキャスト時刻を制御する.一般的に,受信ノードから遠くのノードが送信された無線の電波ほど,伝搬損失のために,受信電力は小さくなる.このことを利用して,提案手法では,新しいメッセージを受信してブロードキャストするまでに,再度同じメッセージを受信した場合,ブロードキャストを取りやめる.これによって,提案手法は,送信ノードからより遠くにある受信ノードが,先にメッセージをブロードキャストする機会を持つことで,少ないブロードキャスト回数で情報を散布させることができる.
シミュレーションによる評価の結果,提案手法は,送信の際に,より大きな電力を用いて無線の送信距離を増加させることで,情報散布率が高い領域を広くすることができること,また,このときのネットワーク全体の消費電力量の増加が小さいことを示した.さらに,ノードをランダム配置したシミュレーションを行い,提案手法は,正方格子上に配置した場合と同様の性質を示すことを明らかにした.


[関連発表論文]
- 久松 潤之, 長谷川 剛, 村田 正幸, “無線センサーネットワークにおける受信電波強度に基づいた省電力情報伝播手法の提案と評価,” 電子情報通信学会技術研究報告 (IN2013-94), vol. 113, pp. 41-46, November 2013.
2.2 モバイルアドホックネットワークアーキテクチャに関する研究
2.2.1 アトラクター選択原理に基づく経路制御に関する研究
情報ネットワークの大規模化,複雑化に伴い,短期的なトラヒック変動から長期的で面的な障害など多様で予測不可能な摂動が頻繁に生じることが予想される.例えば,モバイルアドホックネットワークにおいては,固定のインフラを必要としないなど有線網に優れる一方で,無線通信の低信頼性やトポロジー変化などの影響を受けやすいため,経路制御はトポロジー変化やパケット輻輳に対する耐性を有することが求められる.様々な経路制御手法が提案されてきたが,特に故障や移動のある不安定な環境では制御オーバヘッドが高いという問題がある.
そこで本研究では,まず,モバイルアドホックネットワークを対象に,頑健性と適応性に優れる生物システムに着想を得た経路制御手法MARASを提案している.MARASでは,生物が環境の栄養状態に応じて自身が生成する栄養を適応的に選択する仕組みを数理モデル化したアトラクター選択モデルを応用し,栄養の生成を次ホップノードの選択に対応づけることにより,適応性を獲得している.また,従来手法のように確定的な経路構築を行うのではなく,経路にゆらぎを導入することにより,障害発生時にもパケットは自律的に新たな経路をたどって受信側ノードに到達することができる.シミュレーションにより,高ノード密度,高移動性,過負荷,故障頻発の厳しい環境において,AODVやAntHocNetより,より低いオーバヘッドで,高いパケット配送率を得ることができ,高い耐故障性があることを示した.次に,有線網においても頑健で適応的な経路制御を実現するため,オンデマンド型経路制御手法であるMARASのプロアクティブ型経路制御への適用について検討した.プロアクティブ型経路制御では,通信の有無によらず定常的に他の全てのノードに対する経路情報を維持,更新しなければならないため,経路品質を取得するための制御オーバヘッドが問題となる.そこで,他のノードが実施した経路品質計測の結果を活用することにより,制御メッセージの送出を抑制する手法を提案し,削減前と比較して制御オーバヘッドを40%程度に抑えられること,また,OSPFと比較して1/8程度の制御オーバヘッドで同等品質の経路を維持できることを示した.
また,有線ネットワークを対象に,アトラクター選択モデルにもとづいて経路選択を行うマルチパス経路制御を提案している.マルチパス経路制御では,全ノード対がk本の経路を維持,管理し,これらの経路をその時々の状況に応じて使い分けることで高い耐故障性,または負荷分散を達成している.本研究では,耐故障性に優れた経路候補を構築するとともに,アトラクター選択モデルを経路選択に応用することで,拡張性,耐故障性,環境変動に対する適応性を有する経路制御手法を実現する.シミュレーション評価により,マルチパス経路制御において,リンク,またはノードについて互いに素な経路候補の中から,遅延に基づいたアトラクター選択モデルにより経路を選択することで,高い耐故障性,高い通信性能を達成できることを示した.
[関連発表論文]
- Narun Asvarujanon, Kenji Leibnitz, Naoki Wakamiya, and Masayuki Murata, “Resilient mobile ad hoc routing with attractor selection for dense and heavy traffic scenarios,” to appear in Special Issue on Self-* Systems, International Journal on Autonomous and Adaptive Communications Systems (IJAACS).
- Naotaka Onzuka, Naoki Wakamiya and Masayuki Murata, “Robust and lightweight routing with at-tractor selection,” in Proceedings of 4th World Conference on Information Technology (WICT 2013), November 2013.
- Narun Asvarujanon, “On noise-induced adaptive network control in ad hoc networks based on bio-logical models,” Ph. D thesis, Graduate School of Engineering, Osaka University, 2013.
- Naotaka Onzuka, “Proposal and evaluation of robust multipath routing with attractor selection,” Master's thesis, Graduate School of Information Science and Technology, Osaka University, February 2014.
2.2.2 アトラクター摂動を利用したマルチパス経路制御に関する研究
システムに内在するゆらぎと制御の関係に関して,生物システムを対象にアトラクター摂動という概念が提唱されている.アトラクター摂動モデルでは,ゆらぎのあるシステムへの外力を微少量だけ変化させたときのシステムの観測値の変化量が,外力の変化量と観測値の分散の積に比例することが示されている.すなわち,アトラクター摂動モデルにもとづくと,観測値をある量だけ変化させるために必要な制御の変化量を観測値の分散から推定することができる.
本研究では,このアトラクター摂動の概念を応用することにより,マルチパス経路制御においてトータルの遅延を最小化するトラヒック配分の制御機構を提案している.提案手法では,それぞれの経路を観測することによって得られるエンド間遅延の平均値と分散から,アトラクター摂動モデルによって,トラヒック配分の増減量と平均エンド間遅延の変化量を算出し,重み付き平均エンド間遅延が最小になるようなトラヒック配分を決定する.シミュレーション評価により,遅延情報だけを用いることによって,ロス率などより詳細な情報からスループットを推定,トラヒック配分を行う手法と同程度以上の性能を達成できることを示した.さらに,LTEとWiMAXで通信可能な端末を用いた実機実験により,それぞれ同量のトラヒックを配分する手法,LTEかWiMAXのいずれかのみを用いる手法,および遅延がより小さい方を用いる手法と比較して,提案手法によってより低遅延,高スループットな通信が行えることを確認した.

[関連発表論文]
- Narun Asvarujanon, Kenji Leibnitz, Naoki Wakamiya, and Masayuki Murata, “Concurrent multipath traffic distribution in ad hoc networks based on attractor perturbation,” in Proceedings of 32nd IEEE International Conference on Computer Communications (INFOCOM 2013), Student Paper Session, Turin, Italy, April 2013.
- Narun Asvarujanon, Kenji Leibnitz, Naoki Wakamiya, and Masayuki Murata, “An attractor perturba-tion-based traffic distribution method and its practical experiments,” in Proceedings of the 2013 In-ternational Symposium on Nonlinear Theory and its Applications (NOLTA2013), (Santa Fe, USA), September 2013.
- Narun Asvarujanon, “On noise-induced adaptive network control in ad hoc networks based on bio-logical models,” PhD thesis, Graduate School of Engineering, Osaka University, 2013.