2. IoT (Internet of Things)/M2M (Machine-to-Machine) ネットワークアーキテクチャに関する研究
2.1. センサーネットワークアーキテクチャに関する研究
2.1.1. 自己組織型ネットワーク制御の収束性・適応性・安定性向上に関する研究(1.1.1項再掲)
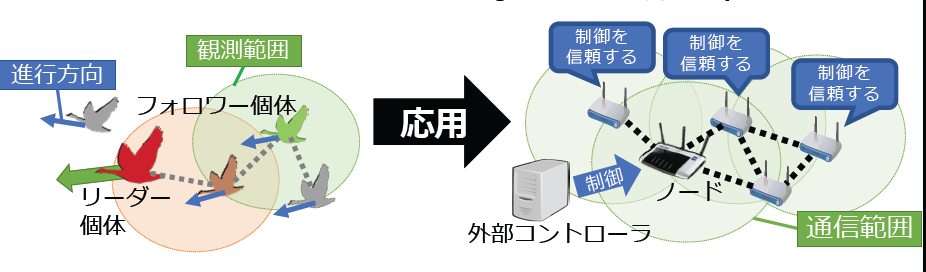
ネットワークの大規模化、複雑化に伴い顕在化した問題を解決するため、生物の仕組みに着想を得た自己組織化の原理が注目を集めている。しかしながら、自己組織化の原理を応用した自己組織型システムは、システム全体の最適性が保証されない、機能創発に長い時間を要するという問題を有しており、ひいては環境変動への適応速度の遅さにつながっている。自己組織型システム本来の局所性を維持しつつ、変化し続けるネットワーク環境へと適応していくために、我々は管理型自己組織化制御に着目している。管理型自己組織化制御は、システムの外部に管理ノードを導入し、システム外部から観測および制御入力を与えることにより所望の状態へとシステムを誘導する制御技術である。本研究では、集中型の管理により実現する最適フィードバックメカニズムを、自己組織的な経路制御手法であるポテンシャルルーティングに組み込むことで、自己組織型制御の収束性を向上する手法を提案した。さらに、図に示すように、生物の集団的行動(collective dynamics)の知見に基づくモデルの一つであるeffective leadership modelモデルを応用することで、個々のノードが持つ情報の正確さと、個々のノードが近隣のノードの情報をどの程度信頼するのかを表現する相互作用モデルを構築し、ネットワークシステム全体での意思決定の正確さを向上した。
[関連発表論文]
- Naomi Kuze, Daichi Kominami, Kenji Kashima, Tomoaki Hashimoto, and Masayuki Murata, “Self-organizing Control Mechanism Based on Collective Decision-making for Information Uncer-tainty,” ACM Transactions on Autonomous and Adaptive Systems, vol. 13, April 2018.
- Naomi Kuze, Daichi Kominami, Kenji Kashima, Tomoaki Hashimoto, and Masayuki Murata, “Self-organizing Control Mechanisms According to Information Confidence for Improving Perfor-mance,” in Proceedings of IEEE Global Communications Conference (IEEE GLOBECOM 2018), (Abu Dhabi), December 9-13, 2018.
- 志垣沙衣子, 久世尚美, 小南大智, 加嶋健司, 村田正幸, “集団的な行動選択の仕組みに着想を得た自己組織的なコントローラの信頼度判定手法の提案,” 電子情報通信学会技術研究報告(IN2018-108), March 2019.
2.1.2. ニホンアマガエルの合唱行動のモデル化と通信ネットワークへの応用(1.1.2項再掲)
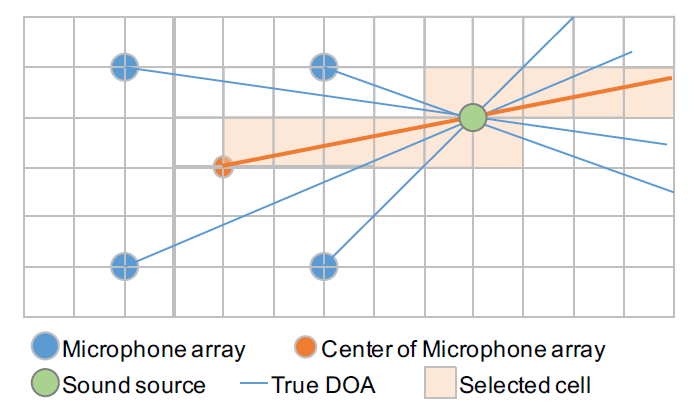
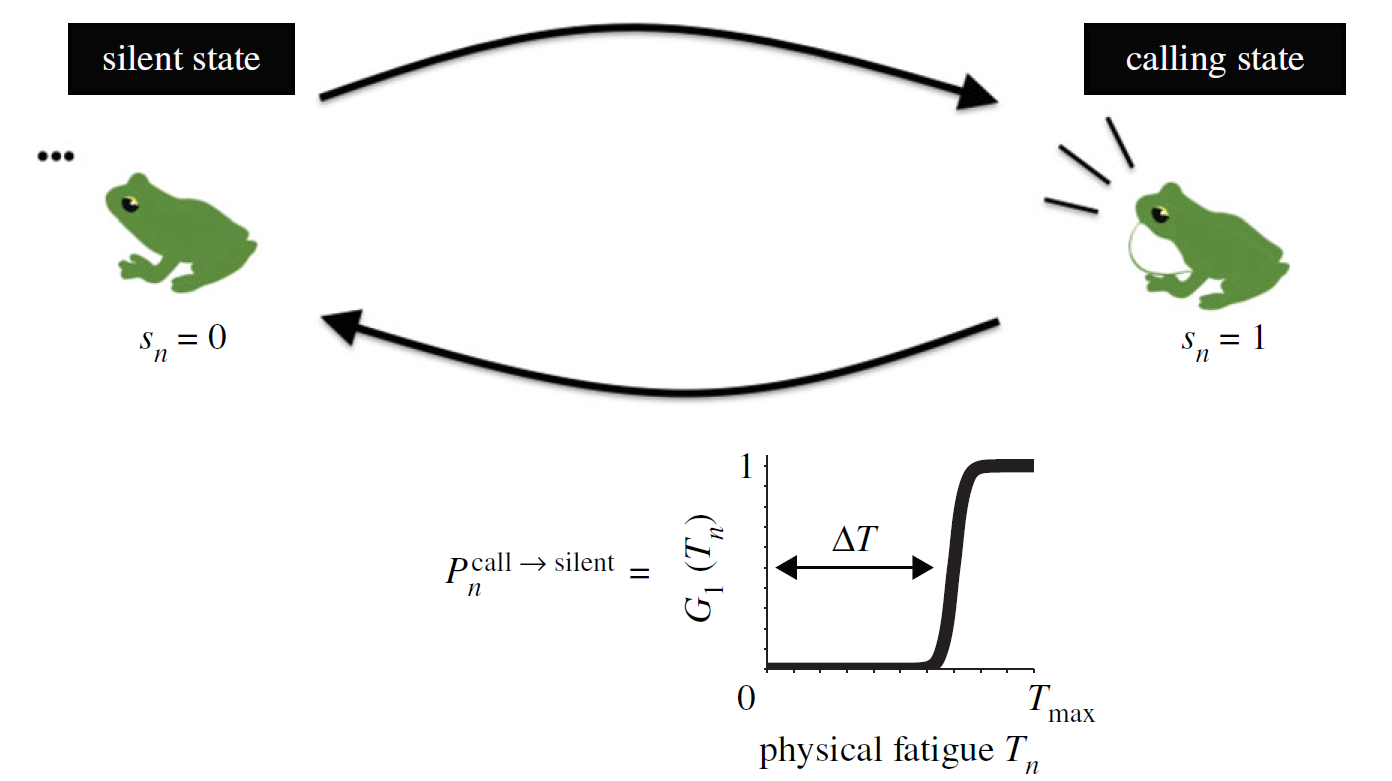
様々な生物の振る舞いを解析することで得られた数理モデルを情報通信分野に用いることで、環境適応力を有する通信制御手法へとつながることが期待されている。生物の振る舞いを知るためには生物の生態調査が必須であるが、中にはその発見が非常に困難な種もいる。本研究はニホンアマガエルの合唱行動に着目しており、①発生個体の位置推定、②発生情報を元にした合唱モデルの構築、③センサーネットワークへの応用、の三点を行っている。位置推定については、カエルの鳴き声を用いることで位置の推定を行う。音声信号到来方向(DOA)を用いた位置推定システムの実装を行い、その性能を評価した。周囲に障害物のない環境において、単一音源の位置推定実験を行い、5m×15 mの領域内では平均誤差が0.60 m 以下で位置の推定が可能であることを示した。また、カエルの合唱モデルに関して、従来短い周期では逆相同期を行うことが知られていたが、より長い周期に着目すると、群れ全体が合唱する状態と、鳴かずにいる状態が交互に現れる。この長期的ダイナミクスのモデルを構築し、センサーネットワークへの応用可能性を示した。
[関連発表論文]
- 合原一究, 小南大智, 細川侑嗣, 村田正幸, “カエルの合唱に学ぶ通信方式の提案,” 2019年電子情報通信学会総合大会, March 2019.
- Ikkyu Aihara, Daichi Kominami, Yasuharu Hirano, and Masayuki Murata, “Mathematical Modeling and Application of Frog Choruses as an Autonomous Distributed Communication System,” Royal Society Open Science, vol. 6, pp. 181117, January 2019.
- Yushi Hosokawa, Yasuharu Hirano, Daichi Kominami, Ikkyu Aihara and Masayuki Murata, “Im-plementation of a real-time sound source localization method for outdoor animal detection using wireless sensor networks,” submitted for publication, March 2019.脳ネットワークの構造に着想を得たロバスト性を有するネットワーク構成手法.
2.2. 次世代移動体通信ネットワークに関する研究
2.2.1. 第5世代移動通信システムの移動管理制御の安定性向上に関する研究(NECシステムプラットフォーム研究所との共同研究)(1.1.3項再掲)
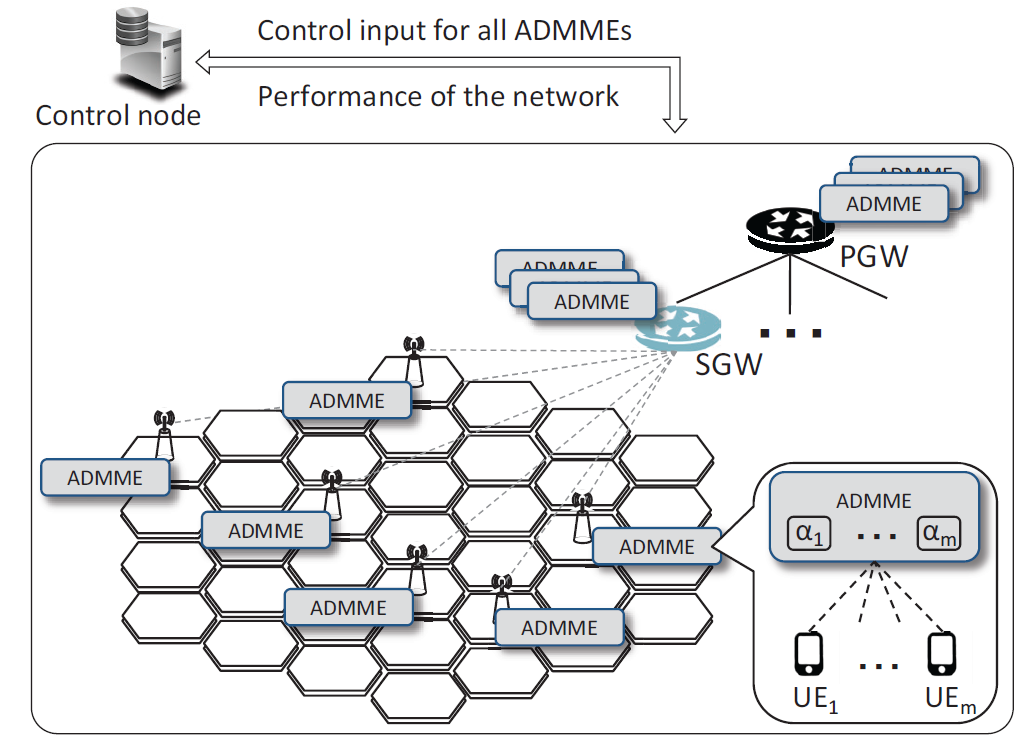
第5世代移動通信システムの実現に向けて様々な研究がなされている。本研究では、我々がこれまでに取り組んできた、自律分散型の移動管理エンティティ(MME)機構に残っていた問題点を解決した。局所的な情報に基づく自律分散型の機構には、システム全体の思惑から外れた行動をとるエンティティが存在する可能性があり、局所解付近での摂動と行った、解の不安定さにつながっていた。自律分散的に存在するシステムに対して、その全体像を把握することはしなくとも、システムから定期的にサンプリングした少数の情報に基づき、システムへの適切な制御入力を与えることで、この不安定さを解決する管理型自己組織機構を提案し、その有効性を示した。
[関連発表論文]
- Takanori Iwai, Daichi Kominami, Masayuki Murata, Ryogo Kubo, and Kozo Satoda, “Mobile Net-work Architectures and Context-Aware Network Control Technology in the IoT Era,” IEICE Trans-actions on Communications, vol. E101-B, pp. 2083-2093, October 2018.
2.2.2. M2M通信収容のためのモバイルコアネットワークアーキテクチャの確立
携帯電話加入者数の増加や高機能なスマートフォン等の普及により,3G やLTE などのモバイルネットワークにおいて,ユーザプレーンとコントロールプレーンの双方において発生する輻輳への対応が課題となっている。特にコントロールプレーンの輻輳については,新たな需要拡大を伴う通信形態であるMachine-to-Machine (M2M) 通信やIoT (Internet of Things) 通信による影響が大きいと指摘されている。M2M/IoT通信は,通信するデータ量そのものは多くはないが,端末数が膨大になるとされており,その通信特性は大きく異なる。そのため,M2M/IoT通信を行う端末を従来の携帯電話端末と同じ方式でモバイルネットワークに接続すると,特にコントロールプレーンの輻輳が悪化すると考えられる。スマートフォンのようなユーザ端末のトラヒックはユーザの端末操作に応じて発生し,遅延時間に対する要求条件も厳しいため,輻輳解消のための制御は不向きである。一方,M2M/IoT端末が発生させる通信は一般的に機械に組み込まれることが多く,端末数が非常に多く,間欠的であり,遅延時間に対する制約はユーザ端末に比べると緩い場合がある。このような特性を持ったトラヒックに関して,制御の効果を生み出しやすいことが期待される。
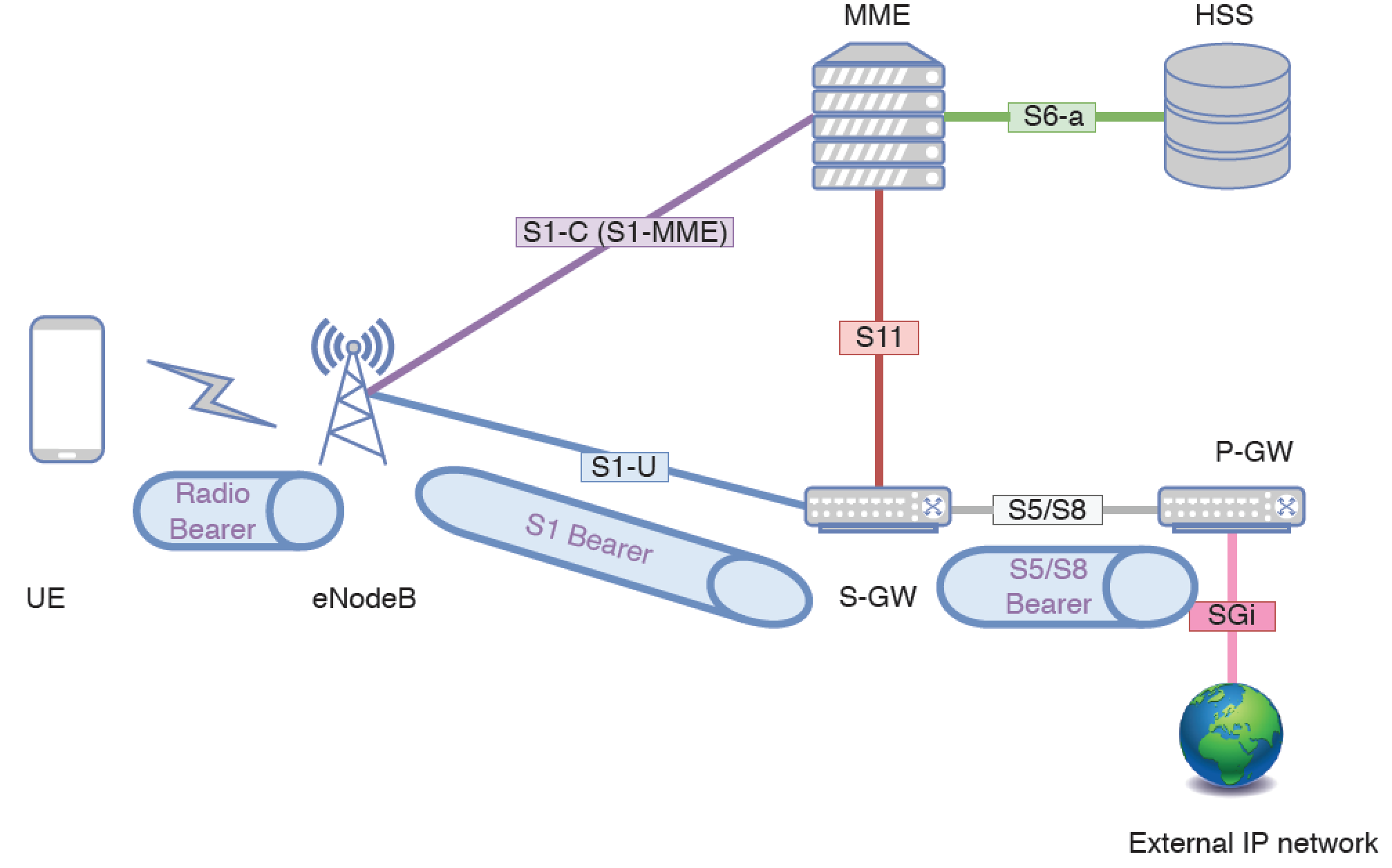
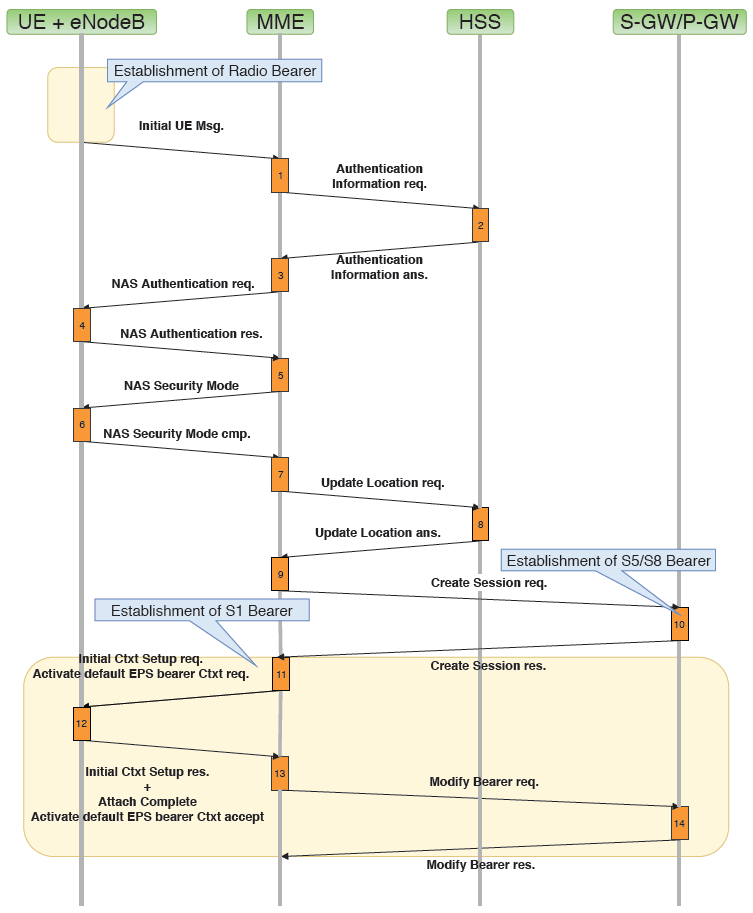
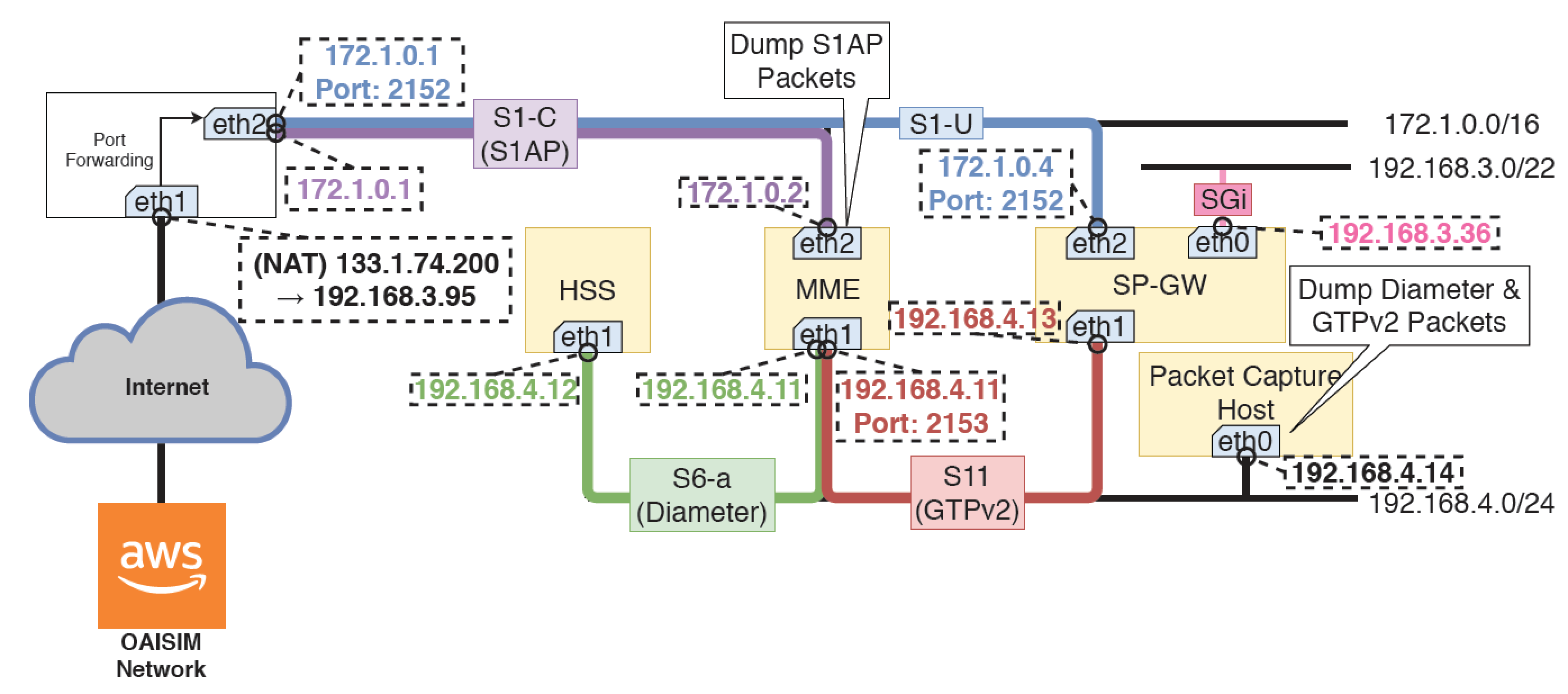
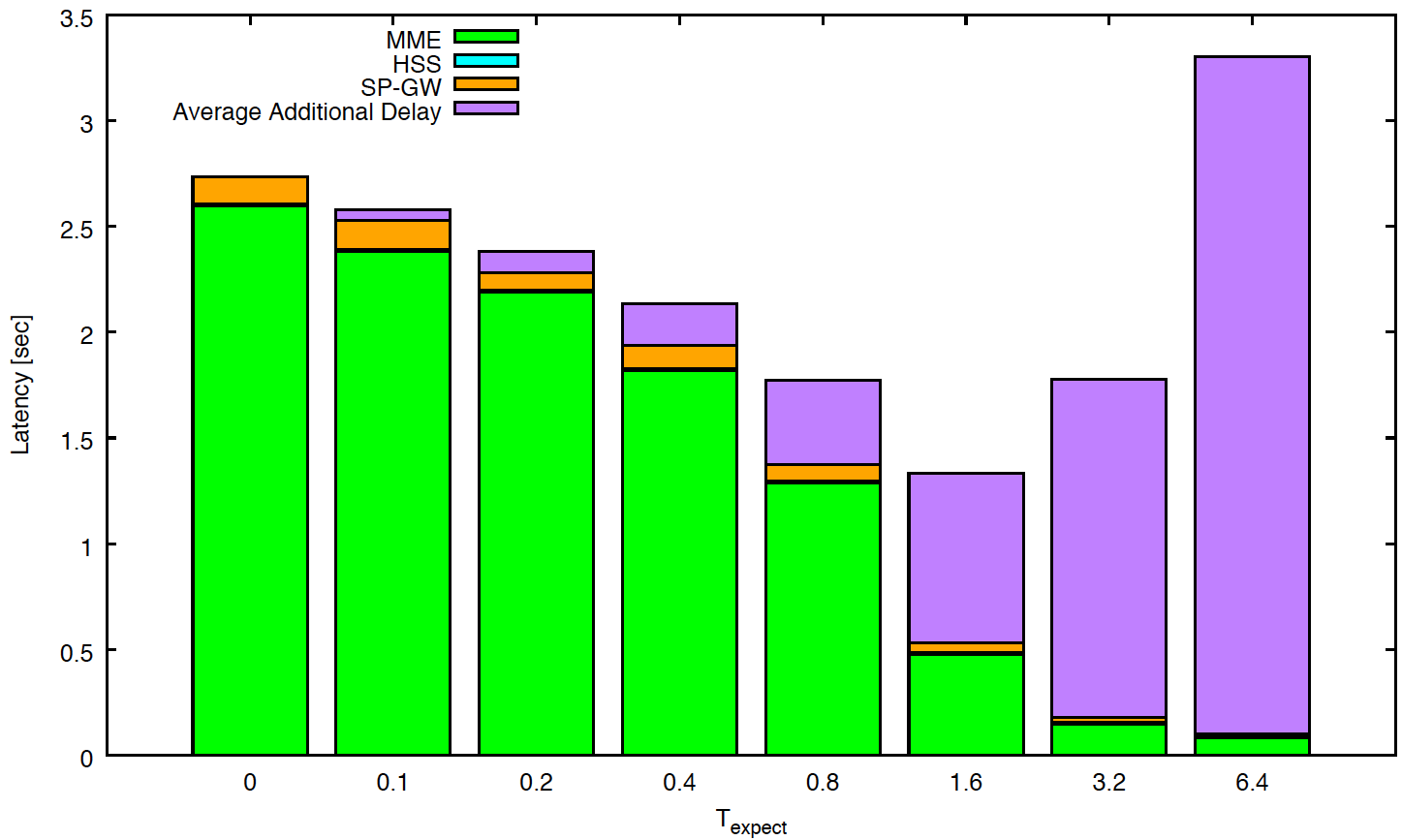
本研究では,モバイルコアネットワークを構築するための実ソフトウェアを仮想化プラットフォーム上に展開し,端末が通信を行う際に必要となるシグナリング処理の処理遅延時間を評価した。モバイルコアネットワークの構築には OpenAirInterface を用い,更に多数のユーザ端末をクラウドコンピューティングプラットフォーム上に展開することで,複数の端末がコアネットワークに接続する環境を構築した。評価の結果,1 コア1 GHz のCPU を持つ仮想マシンにMME の機能を持たせた場合,128 台のユーザ端末からの同時アクセスによって,ベアラ確立時間が最大で450 % 増加することがわかった。
[関連発表論文]
- Masaki Ueno and Go Hasegawa and Masayuki Murata, “Experimental Evaluation of Mobile Core Networks on Simultaneous Access from M2M/IoT Terminals,” in Proceedings of 2019 International Conference on Information Networking (ICOIN 2019), January, 2019.
- 上野真生, 長谷川 剛, 村田正幸, “M2M/IoT端末の同時接続要求を考慮したモバイルコアネットワークの実験的評価,” 電子情報通信学会技術研究報告(NS2018-132), November 2018.
- 上野真生, 長谷川 剛, 村田正幸, “多数M2M/IoT端末からの集中アクセスを考慮したモバイルコアネットワークの実験評価,” 電子情報通信学会技術研究報告(NS2018-226), March 2019.
- Masaki Ueno, “Experimental Evaluation of Accommodation Methods of M2M/IoT Terminals in Mobile Core Networks,” Master’s thesis, Graduate School of Information Science and Technology, Osaka University, February 2019.
2.2.3. 仮想化技術に基づくモバイルアクセスネットワークの消費電力削減効果(沖電気との共同研究)
近年、第5世代携帯電話網の実現に向けて、モバイルネットワークを構成するRadio Access Network (RAN)やフロントホールネットワーク、バックホールネットワークの再考が進んでいる。そのような新たなネットワークにおいては、資源利用効率を高めるために、計算機資源やネットワーク資源の仮想化技術が前提となっている。特に、Software Defined Network (SDN) 技術は、ネットワークの柔軟な制御を可能とする重要な技術として考えられている。モバイルネットワークに対して仮想化技術を適用することで、トラヒック需要の変動に応じた柔軟な計算機資源の制御やネットワーク制御が可能となる。また、ネットワークの省電力化に対しても有効であると考えられている。しかし、特にモバイルネットワークにおいては、仮想化技術の適用によるそれらの効果の定量的な評価はほとんど行われていない。
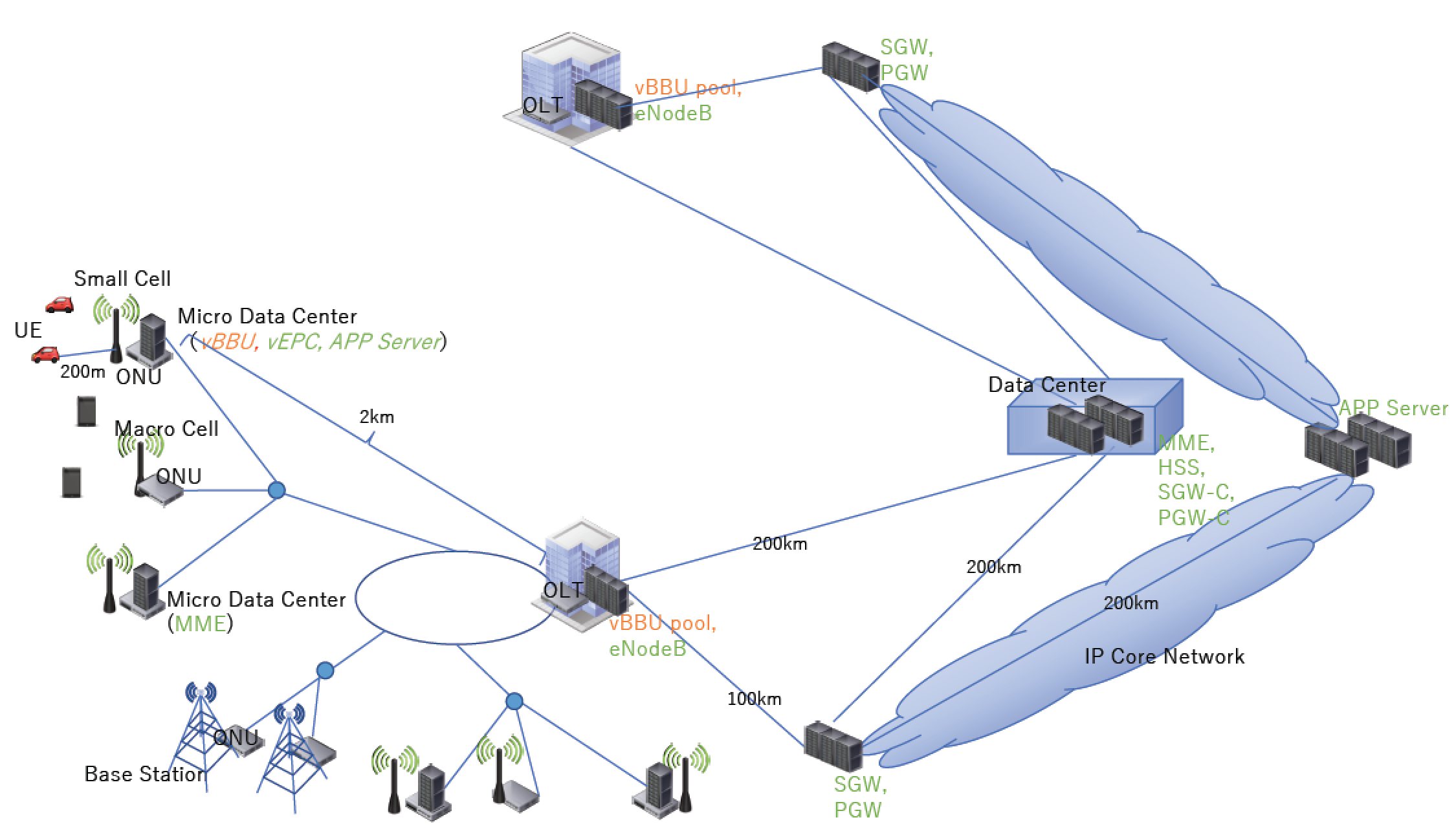
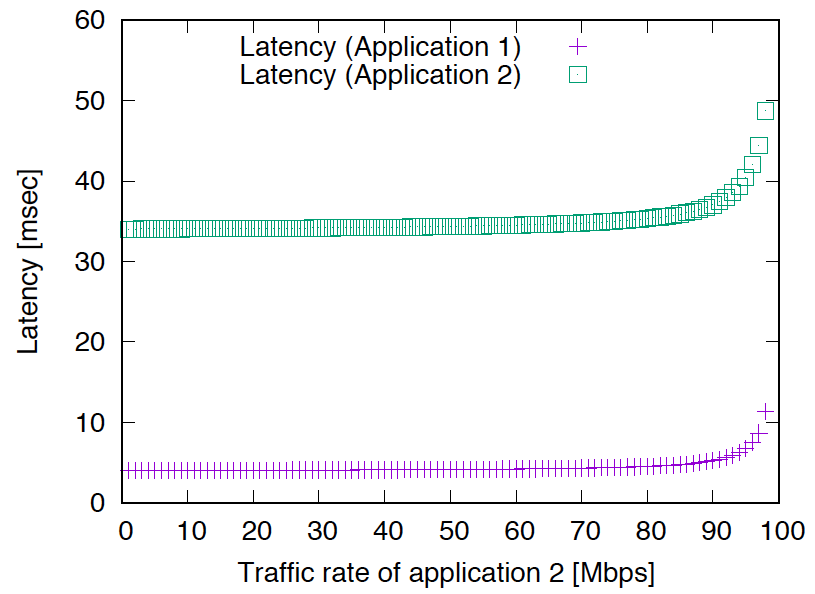
そこで本研究では、フロントホールネットワークとバックホールネットワークの統合制御を前提としたモバイルネットワークに着目し、数学的解析手法に基づいて、その性能評価を行った。具体的には、対象とするネットワークのモデル化を行い、アプリケーショントラヒックのエンド間遅延時間、パケット廃棄率、及び、システム全体の消費電力を導出する解析モデルを構築した。数値評価から、フロントホールとバックホールのネットワーク機能を適切に配置することによって、遅延制約のあるアプリケーショントラヒックのエンド間遅延時間を70%削減できることを明らかにした。
[関連発表論文]
- 山崎里奈, 長谷川剛, 村田正幸, “フロント・バックホール統合型モバイルネットワークの消費電力解析,” 電子情報通信学会技術研究報告(NS2018-227), March 2019.
- Rina Yamasaki, “Power Consumption Analysis of Cloud-based Integrated Mobile Fron-thaul/Backhaul Network,” Master’s thesis, Graduate School of Information Science and Technology, Osaka University, February 2019.
2.3. ネットワークを経由したロボットの遠隔制御に関する研究
2.3.1. 無線ネットワークを経由したロボットの遠隔制御に関する研究(一部、NECシステムプラットフォーム研究所との共同研究)
近年、ドローン、災害救助ロボット、無人搬送車など、ネットワーク経由で制御可能なロボットが注目を集めており、様々な手法が研究されている。それらの機器では、ネットワークを経由することにより、作業を行う領域に人が立ち入ることなく、作業が可能となる。 ネットワーク経由で操作する機器においては、ネットワークの遅延が大きな問題となる。そのような機器を効率的に動作させるためには、遅延分先の実際に制御が行われる状況を予知し、その状況に合わせた制御を行うことが求められる。 我々は、特に、ロボットが動作する環境におけるロボットの状態を監視するセンサーが配置されている状況下において、無線ネットワーク経由でロボットを制御するためのアーキテクチャの検討を行っている。この環境では、環境センサーと有線接続されたコントローラでは、短い遅延でロボットの状況を観測できるものの、無線ネットワーク経由で行われるコントローラ・ロボット間の通信は、大きな遅延が生じ、また、遅延の変動も大きい。本研究では、この環境下において、ロボットを制御するための機能配置や、ネットワークの状態の予測と連携した制御手法に関する研究を進めている。
[関連発表論文]
- 吉田裕志, 安田真也, 熊谷太一, 大下裕一, 里田浩三, 村田正幸, “[招待講演]通信ネットワークを介した遠隔制御手法と複数ロボットによる協調搬送への応用,”電子情報通信学会技術研究報告(IN2018-55), pp. 19-24, November 2018.
- 大下裕一, 安田真也, 熊谷太一, 吉田裕志, 里田浩三, 村田正幸, “環境センサーを用いたロボットの無線遠隔制御のアーキテクチャの検討,” 電子情報通信学会技術研究報告(IN2018-14), August 2018.
- 松田拓己, 大下裕一, 村田正幸, “無線ネットワークを経由した移動ロボットの遠隔操作におけるベイズ推定を用いた環境同定手法,” 電子情報通信学会技術研究報告(SSE98-101), vol. 6, pp. 21-26, August 2018.
- 安田真也, 大下裕一, 熊谷太一, 吉田裕志, 里田浩三, 村田正幸, “環境センサーを用いたロボットの無線遠隔制御の実機実験,” 電子情報通信学会 技術研究報告(IN2018-15), pp 15-20, August 2018.
2.4. IoTネットワークにおける相互依存関係に関する研究
2.4.1. 脳機能ネットワークの構造に着想を得たロバスト性を有するネットワーク構成手法(1.3.1項再掲)
将来における無線センサーネットワークは、単に情報を収集するだけではなく、Internet of Thingsに統合された情報基盤としてその重要性を増していくと考えられている。多様な通信要求に適切に応じるために、ネットワークの構造自体をどのように設計するべきかという観点から遅延時間や通信帯域、耐故障性といったネットワーク性能を向上することも重要な課題となる。そこで我々は、人間の脳ネットワークの構造に着目した。脳ネットワークは高い通信効率とロバスト性を有することが期待され、その特徴を有するネットワークトポロジーを構築する手法を提案する事により、これらの課題の解決を目指す。このようなトポロジー構築方法の応用先として、センサーネットワークにおいて有効となる仮想ネットワーク構築に取り組んだ。脳ネットワークが有する特徴として、階層的なモジュール構造とスモールワールド性、特徴的な次数相関があり、これらの構造的特徴を導入したトポロジー構築方法を提案し、通信効率やロバスト性の観点から、その有効性をシミュレーションで示した。
[関連発表論文]
- Masaya Murakami, Daichi Kominami, Kenji Leibnitz, and Masayuki Murata, “Drawing Inspiration from Human Brain Networks: Construction of Interconnected Virtual Networks,” Sensors, vol. 18, no. 4, pp. 1133, April 2018.
2.4.2. ネットワーク仮想化技術を用いたサービス連携技術に関する研究(KDDI総合研究所との共同研究)
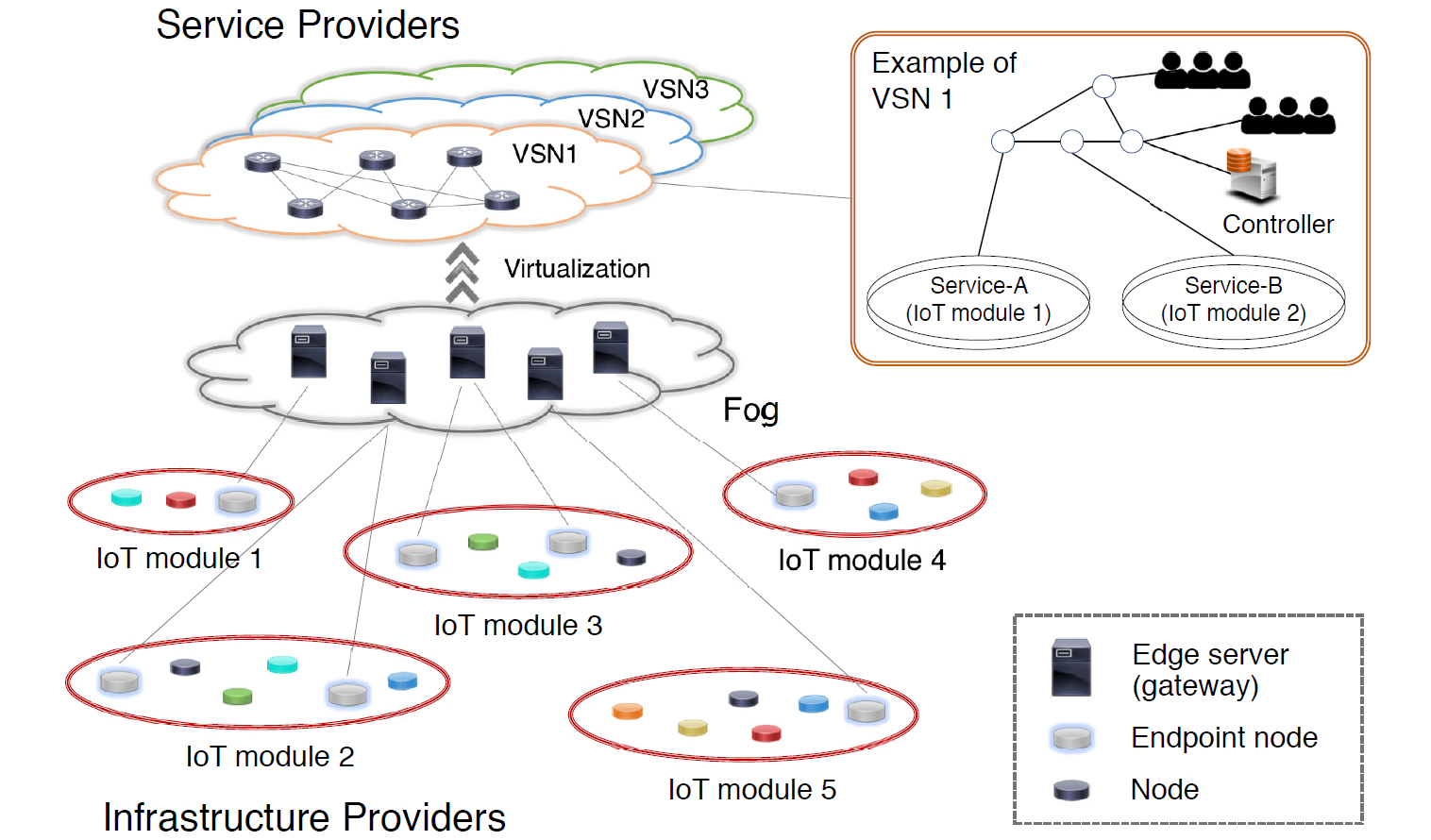
情報通信技術が社会に深く浸透し、あらゆる機器や人が情報ネットワークを構成する時代が到来しつつある。特に近年は、ネットワーク仮想化技術の進展を背景に、いくつかの(マイクロ)サービスネットワークを連携させ、新たなサービスを創発するネットワークシステムが注目されている。本研究では、複数のサービスネットワークが多重化されるNetwork of Networks (NoN)環境において、サービスネットワークの相互接続ノードの選定手法を提案した。提案したノード選定手法は、先行研究で提案されているDempster-Shaferの証拠理論にもとづく重要ノード選定手法を発展させ、複数のサービスネットワークの複数の異なる指標を統合して相互接続に用いる最重要ノードを選定する。3種類のサービスネットワークが多重化された NoNにおいて、2つのノード重要性指標を統合して最重要ノードを選定する数値例を提示した。
[関連発表論文]
- 荒川伸一, 荻野長生, 北原 武, 長谷川 剛, 村田正幸, “証拠理論にもとづく相互接続ネットワークの構築手法の提案,” 電子情報通信学会技術研究報告(NS2018-255), March 2019.
- Nagao Ogino, Takeshi Kitahara, Shin'ichi Arakawa, Go Hasegawa, and Masayuki Murata, “Light-weight Boolean Network Tomography Based on Partition of Managed Networks,” Journal of Net-work and Systems Management, vol. 26, pp. 284-313, April 2018.
2.5. 実世界とのインタラクションを考慮したIoTネットワーク構成手法に関する研究
2.5.1. ポテンシャル場を用いた実世界表現に基づいたSDI仮想化基盤制御手法(一部、富士通研究所との共同研究)(1.1.4項再掲)
SDI (Software Defined Infrastructure) 環境では、物理的リソースであるコンピューティングリソースとネットワークリソースをスライス化して仮想ネットワークを構築し、その仮想ネットワークをユーザに提供する。SDI環境を実現する技術として、近年 SDN (Software-Defined Networks) と NFV (Network Function Virtualization) 技術が着目されている。市場導入に向けては、技術標準化が必須であり、現在も進められているところである。しかし、SDI環境の実現に向けたもう1つの課題は、ユーザの需要に応じて仮想ネットワークと物理的なリソースの割り当てを制御することである。特に最近は、センサーデバイスの小型化や低価格化とモバイルデバイスの普及にともない、現実世界の状況をセンシングして分析処理し新たなサービスを提供する実世界センシングが注目されており、ユーザの需要に応じて高速かつ柔軟にネットワークリソースを制御することが望まれる。
本研究では、SDI環境において、局所的なコンピューティングリソース量と、サービス提供にともなって必要となるネットワークリソース量を短周期で制御可能な動的リソース制御方式を提案している。動的リソース制御方式は、現実世界のセンサー情報量と現実世界の情報に対するユーザーアクセス量をポテンシャル場として表現し、ポテンシャルの値に応じたリソース量を配備するものである。計算機を用いた数値結果により、ユーザの移動に対応してポテンシャル場が形成されること、および、リソース制約を反映したポテンシャル場が形成されることを確認した。

[関連発表論文]
- Koudai Kanda, Shin’ichi Arakawa, Satoshi Imai, Toru Katagiri, Motoyoshi Sekiya, and Masayuki Murata , “Dynamic resource control method based on real world representation with potential field,” in Proceedings of IEEE Consumer Communications & Networking Conference (IEEE CCNC 2018), pp. 374–379, (Las Vegas), January 12-15, 2018.
- Onur Alparslan, Onur Gunes, Y. Sinan Hanay, Shin’ichi Arakawa, and Masayuki Murata, “Improving resiliency against DDoS attacks by SDN and multipath orchestration of VNF services,” in Proceed-ings of IEEE International Symposium on Local and Metropolitan Area Networks (LANMAN 2017), (Osaka), June 25-27, 2017.
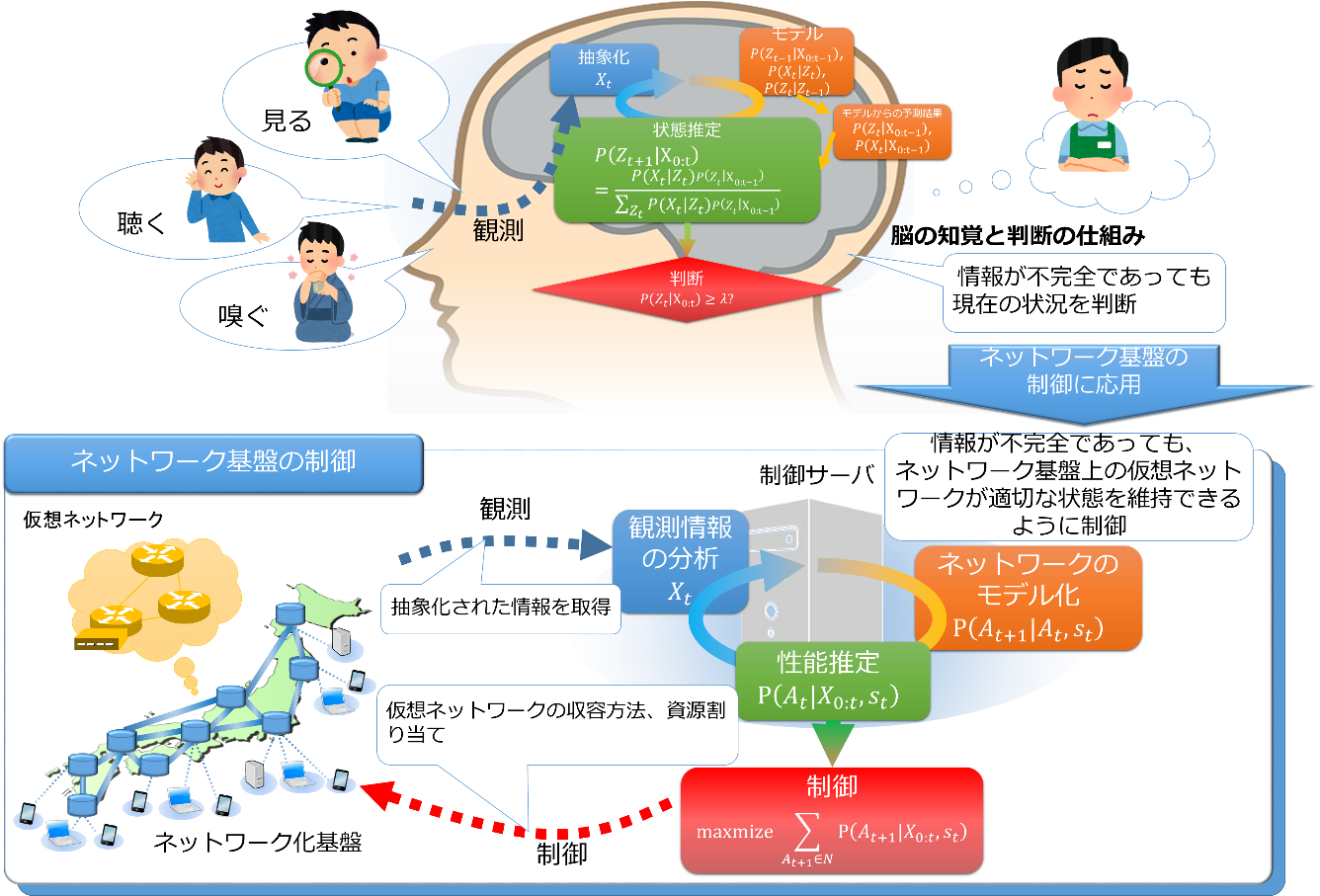
2.5.2. 脳の情報処理機構に基づく予測型ネットワーク制御技術の確立(NTT ネットワーク基盤技術研究所との共同研究)(1.4.2項再掲)
時間変動の大きなトラヒックを収容する手法として、トラヒックの時間変動やネットワークの状態の変化に対して動的に経路や仮想ネットワークの構成、ネットワーク機能の配置を変更する手法の検討が進められている。従来、このような動的なネットワーク制御に関する研究は、現在のトラヒック状況を正確に把握できることや、将来のトラヒック状況の予測の精度が良いことを前提として進められてきた。しかしながら、将来のトラヒック状況を正確に予測することは困難であるといった問題や、大規模なネットワークを制御する際には、ネットワーク全体にわたる正確なトラヒック状況を短周期で把握することは困難であるといった問題が発生し、制御に必要な情報を正確かつ完全に把握することは難しい。
この問題に対して、本研究では、各時刻において不正確・不完全な情報しか観測できない場合であっても、将来のネットワークの状況の予測、予測に基づいたネットワーク制御を行う手法の開発に取り組んでいる。本研究では、上記の目標に対して、脳の情報処理機構に基づいた手法を検討している。脳の情報処理機構の特徴として、単に知覚情報から外部の状態を推定するのみならず、その推定状態にもとづいて目標に近づくために行動するといったフィードバックを行うことがあげられる。このとき、目標に対する行動決定はあらかじめなされている訳ではなく、行動の結果を再び観測することにより、逐次フィードバックを行う。これにより、毎回得られる観測情報は不完全であり、目標も不明確であるにも関わらず、脳は行動を制御している。
提案手法では、このような脳の情報処理機構に基づき、ネットワーク内から得られる不完全な観測結果をもとに、ネットワークの状態を把握し、将来のネットワークの状況を予測、ネットワークの制御方法を決定する。さらに、ネットワークの制御への影響を考慮して、次に観測すべきトラヒックを決める。この制御ループを繰り返すことにより、各時刻に観測可能な情報が不完全であっても、ネットワーク制御への影響が大きい箇所を集中的に観測することができ、輻輳を回避した、適切な状態へとネットワークを制御することが可能となる。
本研究では、シミュレーションにより本手法の評価を行い、各時刻において、ネットワーク内の一部のトラヒック状況しか収集できない状況においても、輻輳を回避した経路を設定可能であることを示している。
[関連発表論文]
- Kodai Satake, Tatsuya Otoshi, Yuichi Ohsita, and Masayuki Murata, “Traffic Engineering and Traffic Monitoring in the case of Incomplete Information,” IEICE Transactions on Communications, Vol. E102-B, No. 1, pp. 111-121, January 2019.
- 佐竹幸大, 安世民, 大下裕一, 村田正幸, “脳の情報処理機構にもとづく実世界協調予測型ネットワーク資源制御の一考察”, 電子情報通信学会技術研究報告(IN2018-133), March 2019.
- 安 世民, “脳の認知機能モデルを用いた複数ネットワークスライスへのサービス品質を考慮した資源割り当て制御,” 大阪大学基礎工学部情報科学科特別研究報告, February 2019.