5. 次世代エッジコンピューティングに関する研究
5.1. マイクロデータセンターにおけるリソース分離型アーキテクチャに関する研究
5.1.1. マイクロデータセンターにおけるリソース分離型アーキテクチャに関する研究
近年、リアルタイム性の高い処理の実行のために、ユーザにより近いエッジに配置可能な比較的小規模のデータセンターであるマイクロデータセンターが提案されている。マイクロデータセンターは、大規模なデータセンターと比べて保有する資源量は限られているため、無駄のない資源利用が重要となる。そこで、CPU やメモリ等の資源同士を独立させ、ネットワークでつないだリソース分離型マイクロデータセンターが提案されている。リソース分離型マイクロデータセンターでは、資源割り当てがアプリケーションの実行性能に大きな影響を持ち、割り当て方によって、十分な資源が存在する場合でもそれらをつなぐネットワーク資源が枯渇してしまう恐れがある。
そこで、本研究では、各資源の重要性に基づいた割り当てコストをもとに資源を割り当てることで、将来のアプリケーションの収容に必要となる資源の利用を回避し、必要な時に必要な資源をアプリケーションに対して割り当てることを実現する手法について提案し、シミュレーション評価により、提案した手法を用いることにより、短時間での処理を求められるようなアプリケーションに対しても適切な資源を割り当てることができることを示している。また、このような各アプリケーションに対する動的な資源割当に適したマイクロデータセンター内のネットワーク構成についても検討を進めている。

[関連発表論文]
- Akishige Ikoma, Yuichi Ohsita and Masayuki Murata, “Optical network topology design to execute many tasks simultaneously in a disaggregated data center,” IEEE/OSA Journal of Optical Commu-nications and Networking, vol. 16, no. 7, pp. 764–780, July 2024.
- Akishige Ikoma, Yuichi Ohsita and Masayuki Murata, “Resource allocation considering impact of network on performance in a disaggregated data center,” IEEE Access, vol. 12, pp. 67600–67618, May 2024.
- Akishige Ikoma, Yuichi Ohsita and Masayuki Murata, “Dynamic resource allocation considering workload changes in a disaggregated data center,” in Proceedings of 2025 IEEE 15th Annual Computing and Communication Workshop and Conference (IEEE CCWC), January 2025.
- 生駒 昭繁, 大下 裕一, 村田 正幸, "リソース分離型データセンターにおける処理負荷やネットワークの変化を考慮した動的資源割当手法 ," 電子情報通信学会技術研究報告(IN2024-33), pp. 11-16, Sep. 2024.
5.1.2. エッジコンピューティング技術を活用したセルラーV2Xにおける衝突検知手法に関する研究【4.2.1項再掲】
エッジコンピューティングのユースの検討が国内外で進められている。その1つとして、車両や歩行者から局所的に得られる環境情報をデータセンターで収集・解析し、車両群へ安全性に関する情報をフィードバックすることで安全性を高めるITS(Intelligent Transport Systems)アプリケーションへの期待が高まっている。見通しの悪い交差点における衝突検知など、ITSアプリケーションの高度化のためには、車両の自律的な認知機能に加え、車両間で情報共有する機能や各車両で得られる情報を分析して活用する機能が不可欠である。そのため、セルラーシステム等を介して車両環境情報をエッジサーバ上に収集して解析し、車両に解析結果をフィードバックするC-V2Xシステムが注目されている。
以下の研究では、Lidarセンサ情報に基づく3Dマルチオブジェクトトラッキング(MOT)手法を提案し、センサ情報の欠損による物体(移動車両)の検出漏れに対処し、かつ、ネットワーク遅延に起因する物体の位置と実際の位置の誤差を、過去の物体の移動軌跡に基づいて補正することでMOTの精度を向上している。さらに、車両等による遮蔽が頻繁に発生する都市環境において、安全かつ効率的なナビゲーションを両立することを目標とした協調知覚 (CP) による車両走行計画手法を提案した。提案手法では、車両はエッジ サーバを介してセンサーデータと周辺車両と共有する。各車両では、局所的に得られたセンサ情報を用いてオブジェクト追跡を実行しつつ、エッジサーバから受信した情報を使用して車両の視野内に表れる遮蔽領域を特定する。また、遮蔽領域に仮想上の走行車両であるファントムオブジェクトを生成し、潜在的な走行車両を含めた車両走行計画をシミュレートする。Carlaを拡張したシミュレーション評価により、車載センサのみに依存する車両走行計画と比較して、提案手法は走行停止時間が大幅に減少することがわかった。

- Hiroyuki Tsuda, Ryogo Kubo, Masayuki Iwase, Masahito Morimoto, Keisuke Kawahara, Daisuke Noguchi, Yasushi Amamiya, Yongwi Kim, Yoshiaki Nakano, Takuo Tanemura, Masayuki Murata and Shin'ichi Arakawa, “Demonstration of a highly reliable si-photonics-based in-vehicle optical network (SiPhON) for autonomous driving,” in Proceedings of the 50th European Conference on Optical Communications (ECOC), September 2024.
- Hao Su, Shin'ichi Arakawa and Masayuki Murata, “Cooperative 3D multi-object tracking for con-nected and automated vehicles with complementary data association,” in Proceedings of 2024 IEEE Intelligent Vehicles Symposium (IV), pp. 285–291, June 2024.
- Hao Su, Shin'ichi Arakawa and Masayuki Murata, “Occlusion-aware planning for connected and automated vehicles with cooperative perception at unsignalized intersection,” submitted for presentation.
- Hao Su, Shin'ichi Arakawa and Masayuki Murata, “Cooperative 3D multi-object tracking with cross-agent data association for connected and automated vehicles,” submitted for publication.
- Hao Su, Arakawa Shin'ichi and Masayuki Murata, “Enabling occlusion-aware trajectory planning for connected and automated vehicles: A geometric method based on occluded area tracking,” sub-mitted for publication.
5.1.3. Magnitude-Sensitivityを用いたエッジ-クラウド連携制御に関する研究(NECブレイン・インスパイヤード・コンピューティング協働研究所における成果)【2.1.2項再掲】
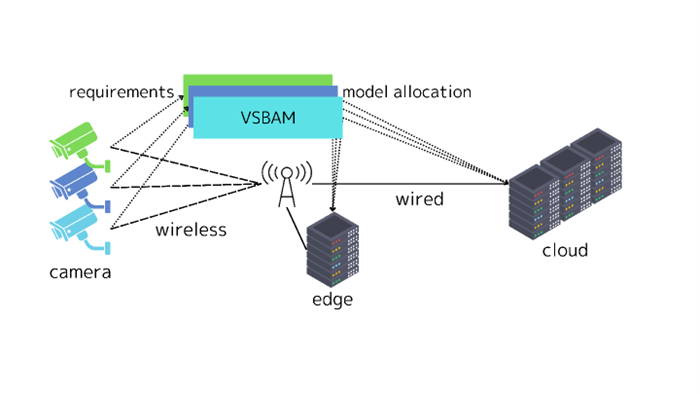
近年、エッジコンピューティングに対応したアプリケーションが注目されている。AI蒸留を始めとしてモデルサイズの軽減技術により、従来のクラウドで提供されるAIよりも低いレイテンシーで、計算能力の限られたエッジや端末上にコンパクトなAIモデルを配置することができる。しかし、一般的にモデルが小さいAIは精度が低いため、処理割り当てを決める際には、精度とレイテンシーのトレードオフ、さらに消費電力を考慮する必要がある。このようなタスク割り当て問題では、計算の困難さからヒューリスティックな解法が必要であるが、環境が準静的な場合、最適解から乖離が問題となる。我々の研究グループでは、準静的環境では最適解を連続的に探索し、動的な環境変化に対しては過去の準静的環境との類似性に基づいて準最適解を即座に決定するというアプローチをとっている。特に、類似性に基づく準最適解の選択には、脳の意思決定の性質であるMagnitude-Sensitivityを応用することが有効である。Magnitude-Sensitivityは良い結果をもたらす選択肢が多い場合に高速に選択を行い、逆に悪い結果をもたらす選択肢が多い場合は時間をかけて慎重に選択を行う。本研究ではゆらぎ学習における生成モデルにMagnitude-Sensitivityを取り込むことでゆらぎ学習を拡張し、エッジ-クラウド連携制御に適用した。シミュレーションを用いた評価により、提案手法は最適化ソルバーと同等の解を短時間で選択可能であることを示した。
[関連発表論文]
- Tatsuya Otoshi, Hideyuki Shimonishi, Tetsuya Shimokawa and Masayuki Murata, “Power efficient edge-cloud cooperation by value-sensitive Bayesian attractor model,” in Proceedings of The Sixth International Workshop on Intelligent Cloud Computing and Networking (ICCN 2024), May 2024.