2. IoT (Internet of Things)/M2M (Machine-to-Machine) ネットワークアーキテクチャに関する研究
2.1. センサーネットワークアーキテクチャに関する研究
2.1.1. 不確実な情報に対する生物の集団的行動選択に基づく無線ネットワーク制御手法(1.1.1項再掲)
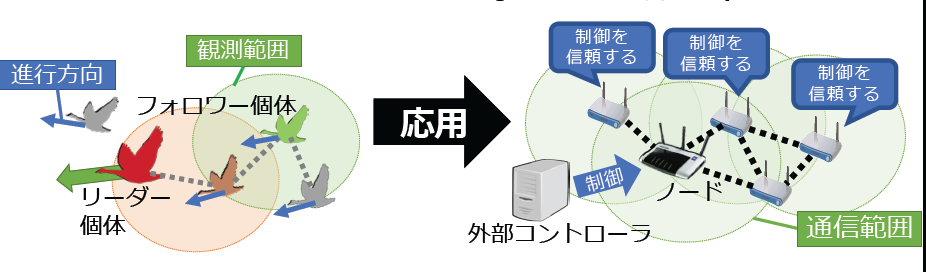
ネットワークの大規模化、複雑化に伴い顕在化した問題を解決するため、生物の仕組みに着想を得た自己組織化の原理が注目を集めている。大規模複雑化がもたらす問題として、各ノードが取得可能な情報が不確実(不完全、曖昧、動的)なものとなる点がある。不確実な情報を用いながらも、ネットワーク全体として一貫した適切な動作を行うことが求められる。本研究では、生物の集団的行動(collective dynamics)の知見に基づくモデルの一つであるeffective leadership modelモデルを応用することで、個々のノードが持つ情報の正確さと、個々のノードが近隣のノードの情報をどの程度信頼するのかを表現する相互作用モデルを構築し、ネットワークシステム全体での意思決定の正確さを向上した。
[関連発表論文]
- 志垣沙衣子, 久世尚美, 小南大智, 加嶋健司, 村田正幸, “集団的な行動選択の仕組みに着想を得た自己組織的なコントローラの信頼度判定手法の提案,” 電子情報通信学会技術研究報告(IN2018-108), March 2019.
- 志垣沙衣子, 久世尚美, 小南大智, 加嶋健司, 村田正幸, “生物の集団的行動選択に基づく不確実な情報を用いた自己組織型ネットワーク制御手法の一検討,” 電子情報通信学会情報ネットワーク研究会(IN2019-128), vol. 119, no. 461, pp. 297-302, March 2020.
2.1.2. ニホンアマガエルの合唱行動のモデル化と通信ネットワークへの応用(1.1.2項再掲)
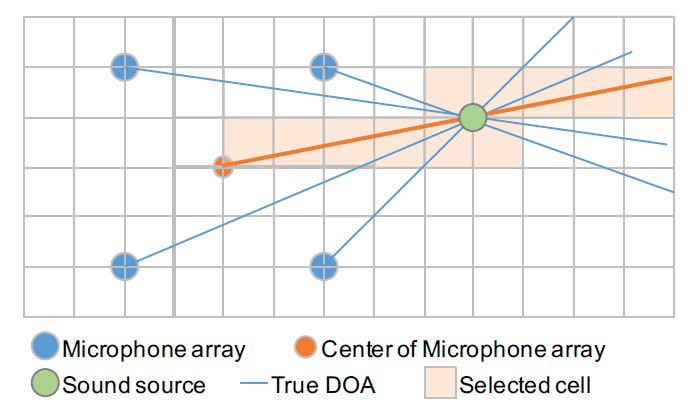
様々な生物の振る舞いを解析することで得られた数理モデルを情報通信分野に用いることで、環境適応力を有する通信制御手法へとつながることが期待されている。生物の振る舞いを知るためには生物の生態調査が必須であるが、中にはその発見が非常に困難な種もいる。本研究はニホンアマガエルの合唱行動に着目しており、①発生個体の位置推定、②発生情報を元にした合唱モデルの構築、③無線ネットワーク通信への応用、の三点を行っている。位置推定については、カエルの鳴き声を用いることで位置の推定を行う。生物調査の観点では、実環境下での個体の観察も重要であり、我々は既存の位置推定手法を拡張し、精度を落とさずに計算時間を削減する方法を提案し、実装を行った。周囲に障害物のない環境において、単一音源の位置推定実験を行い、5m×15 mの領域内では平均誤差が0.60 m 以下で位置の推定が可能であることを示した。
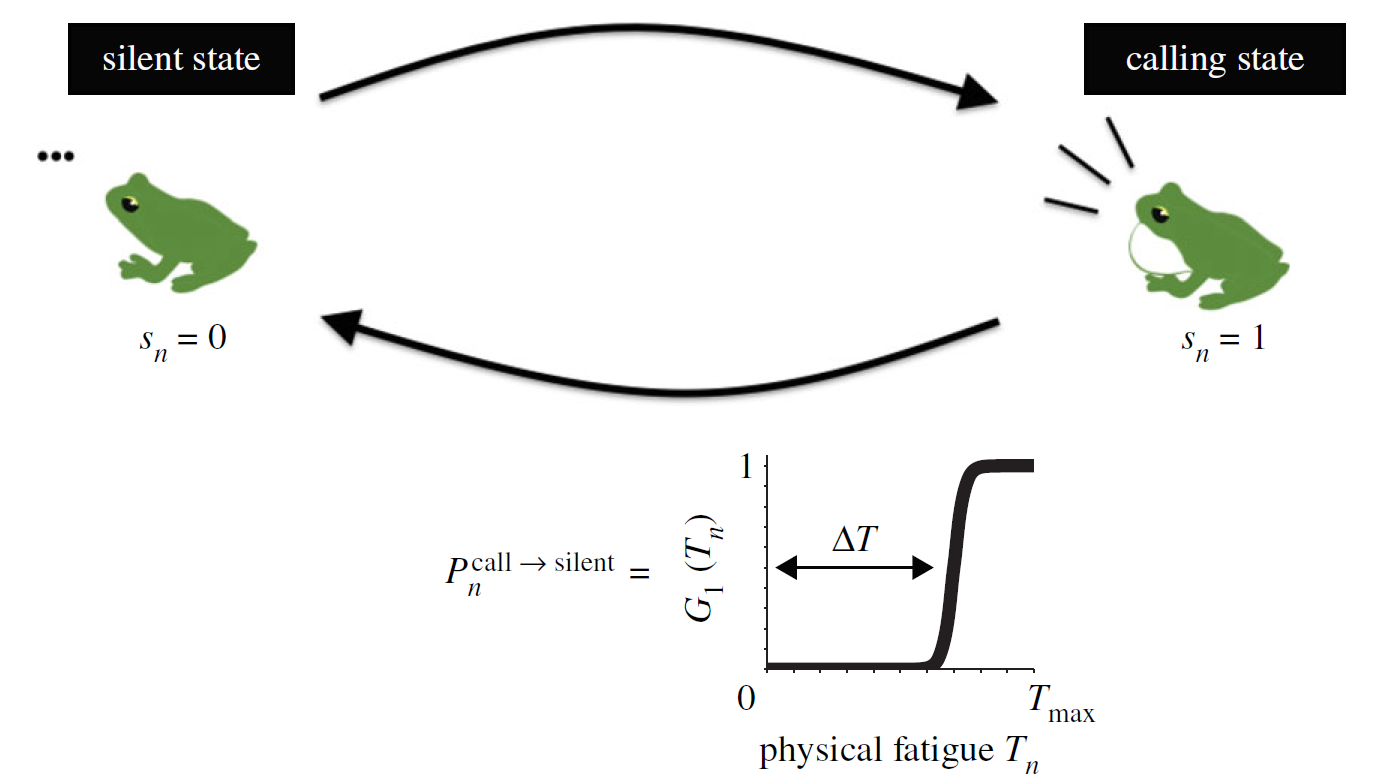
また、カエルの合唱モデルに関して、従来短い周期では逆相同期を行うことが知られていたが、より長い周期に着目すると、群れ全体が合唱する状態と、鳴かずにいる状態が交互に現れる。さらにカエルには、メスに対する魅力の高い個体のそばで鳴かずに留まり、メスの横取りを狙うサテライトと呼ばれる行動が見られる。この合唱モデルをLPWAネットワークにおけるカバレッジ制御へ応用することで、カバレッジを満たす時間の延長を実現できることを示した。
[関連発表論文]
- Yushi Hosokawa, Yasuharu Hirano, Daichi Kominami, Ikkyu Aihara, and Masayuki Murata, “Imple-mentation of a real-time sound source localization method for outdoor animal detection using wireless sensor networks,” in Proceedings of International Conference on Signal Processing and Communica-tion Systems (ICSPCS), pp. 1–6, December 2019.
- Ikkyu Aihara, Daichi Kominami, Yushi Hosokawa, and Masayuki Murata, “Modeling and application of frog choruses as an autonomous distributed communication system over multiple time scales,” in Proceedings of the 3rd International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM), pp. 1–2, November 2019.
- Yushi Hosokawa, “Implementation of a spatial monitoring system for Japanese tree frogs and applica-tion of their satellite behavior to an LPWA network coverage method,” Master’s thesis, Graduate School of Information Science and Technology, Osaka University, February 2020.
- 細川侑嗣, 小南大智, 合原一究, 村田正幸, “ニホンアマガエルのサテライト行動に着想を得たLPWA ネットワークのカバレッジ設計手法,” 電子情報通信学会ネットワークシステム研究会(NS2019-86), vol. 119, no. 461, pp. 61-66, March 2020.
2.2. 次世代移動体通信ネットワークに関する研究
2.2.1. M2M/IoT通信収容のためのモバイルコアネットワークアーキテクチャの確立
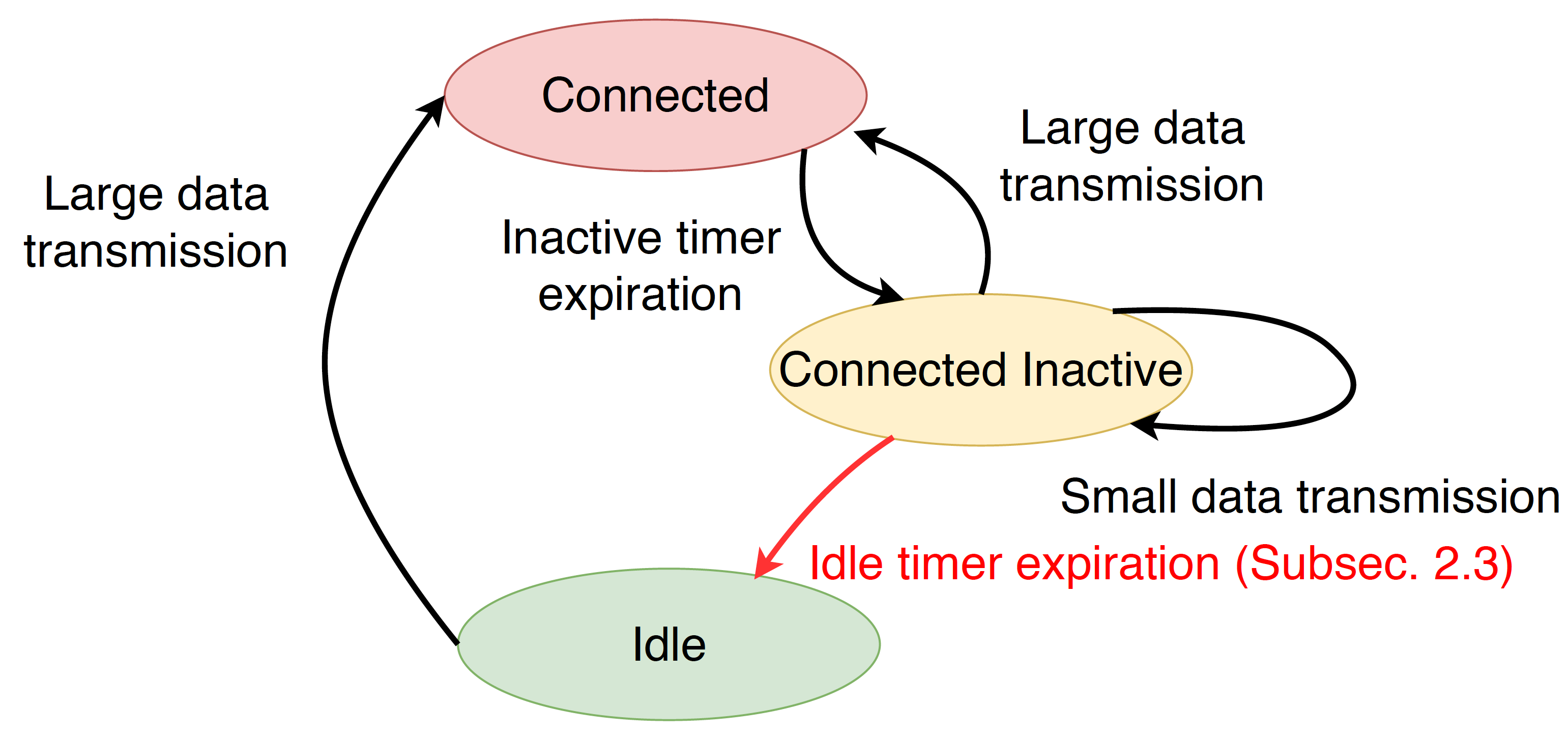
携帯電話加入者数の増加や高機能なスマートフォン等の普及により,3G やLTE などのモバイルネットワークにおいて、ユーザプレーンとコントロールプレーンの双方において発生する輻輳への対応が課題となっている。特にコントロールプレーンの輻輳については、新たな需要拡大を伴う通信形態であるMachine-to-Machine (M2M) 通信やIoT (Internet of Things) 通信による影響が大きいと指摘されている。M2M/IoT通信は、通信するデータ量そのものは多くはないが、端末数が膨大になるとされており、その通信特性は大きく異なる。そのため、M2M/IoT通信を行う端末を従来の携帯電話端末と同じ方式でモバイルネットワークに接続すると、特にコントロールプレーンの輻輳が悪化すると考えられる。スマートフォンのようなユーザ端末のトラヒックはユーザの端末操作に応じて発生し、遅延時間に対する要求条件も厳しいため、輻輳解消のための制御は不向きである。一方、M2M/IoT端末が発生させる通信は一般的に機械に組み込まれることが多く、端末数が非常に多く、間欠的であり、遅延時間に対する制約はユーザ端末に比べると緩い場合がある。
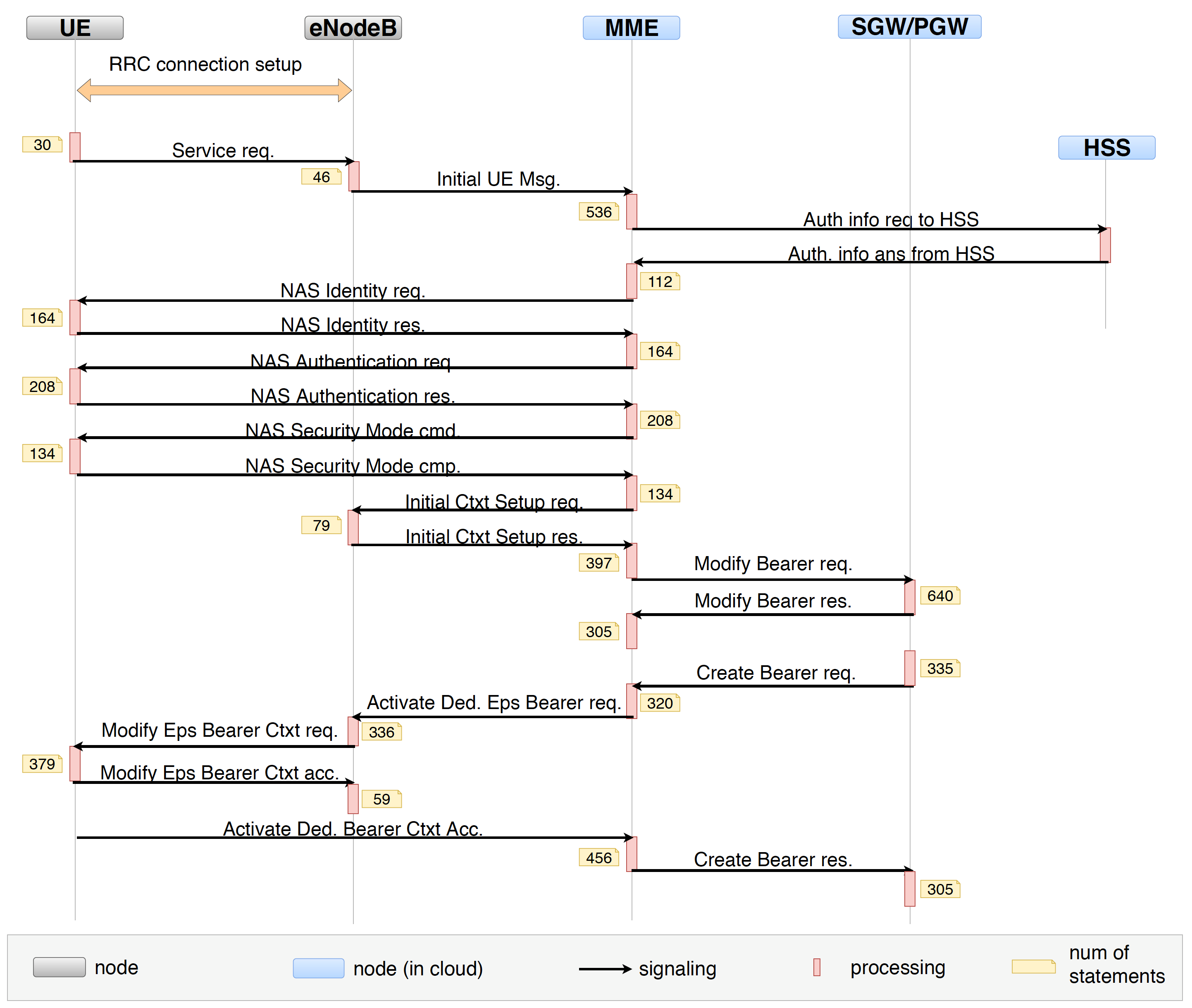
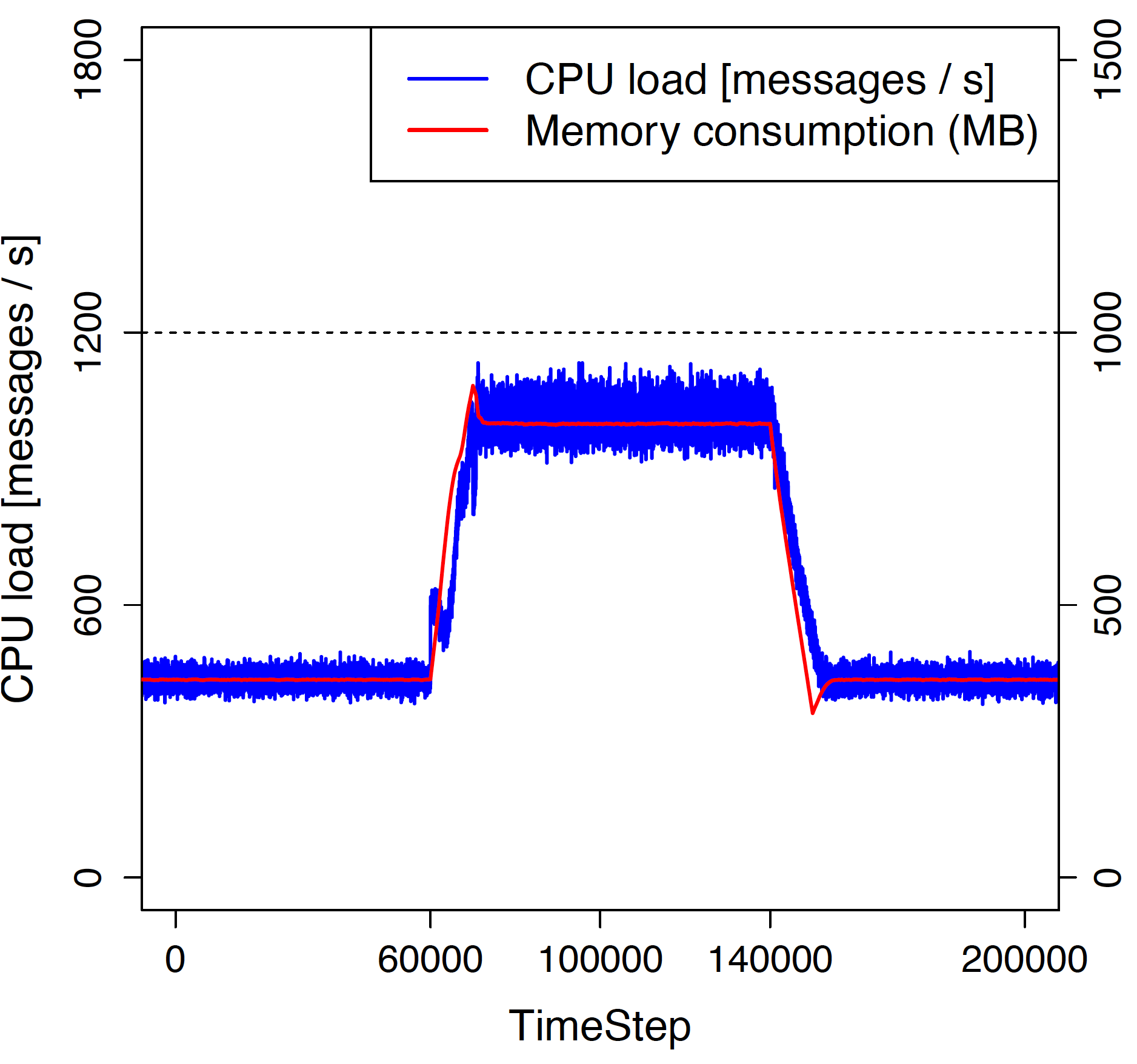
したがって、モバイルネットワーク事業者は、自身が運用するモバイルコアネットワークの収容端末台数やその通信特性に応じて、ノード資源が枯渇しないようにすることが求められる。本研究では、ノードへの資源割り当てを動的に行うのではなく、端末の通信時のシグナリング手順のパラメータを調整することによって、既に割り当てられている資源を効率的に使用し、収容可能か端末台数を増加する方法を提案した。具体的には、端末がアイドル状態に遷移するまでのタイムアウト時間を動的に調整することで、モバイルコアノードのCPU負荷とメモリ消費量を制御する。シミュレータを用いた性能評価の結果、提案手法を用いない場合には、接続端末が増加した際にメモリあるいはCPU能力が不足するような場合に、提案手法を用いることで、CPUとメモリ負荷をお互いに調整することで、新たな端末を接続できる状態にできることを確認した。
[関連発表論文]
- 安達智哉, 阿部修也, 長谷川剛, 村田正幸, “IoT 端末を考慮したシグナリング制御によるモバイルコアノードの資源利用の効率化,” 電子情報通信学会技術研究報告CQ2019-97, pp. 47–52, November 2019.
- 安達智哉, 阿部修也, 長谷川剛, 村田正幸, “モバイルコアネットワークのノード資源利用の効率化のためのシグナリング制御手法, ” vol. 119, pp. 35–40, March 2020.
- Tomoya Adachi, “Adaptive Signaling Control Method for Efficient Resource Utilization of Mobile Core Networks,” Master’s thesis, Graduate School of Information Science and Technology, Osaka University, February 2020.
2.2.2. 仮想化技術に基づくモバイルアクセスネットワークの消費電力削減効果(沖電気との共同研究)
近年、第5世代携帯電話網の実現に向けて、モバイルネットワークを構成するRadio Access Network (RAN) やフロントホールネットワーク、バックホールネットワークの再考が進んでいる.そのような新たなネットワークにおいては、資源利用効率を高めるために、計算機資源やネットワーク資源の仮想化技術が前提となっている。特に、Software Defined Network (SDN) 技術は、ネットワークの柔軟な制御を可能とする重要な技術として考えられている。モバイルネットワークに対して仮想化技術を適用することで、トラヒック需要の変動に応じた柔軟な計算機資源の制御やネットワーク制御が可能となる。また、ネットワークの省電力化に対しても有効であると考えられている。しかし、特にモバイルネットワークにおいては、仮想化技術の適用によるそれらの効果の定量的な評価はほとんど行われていない。
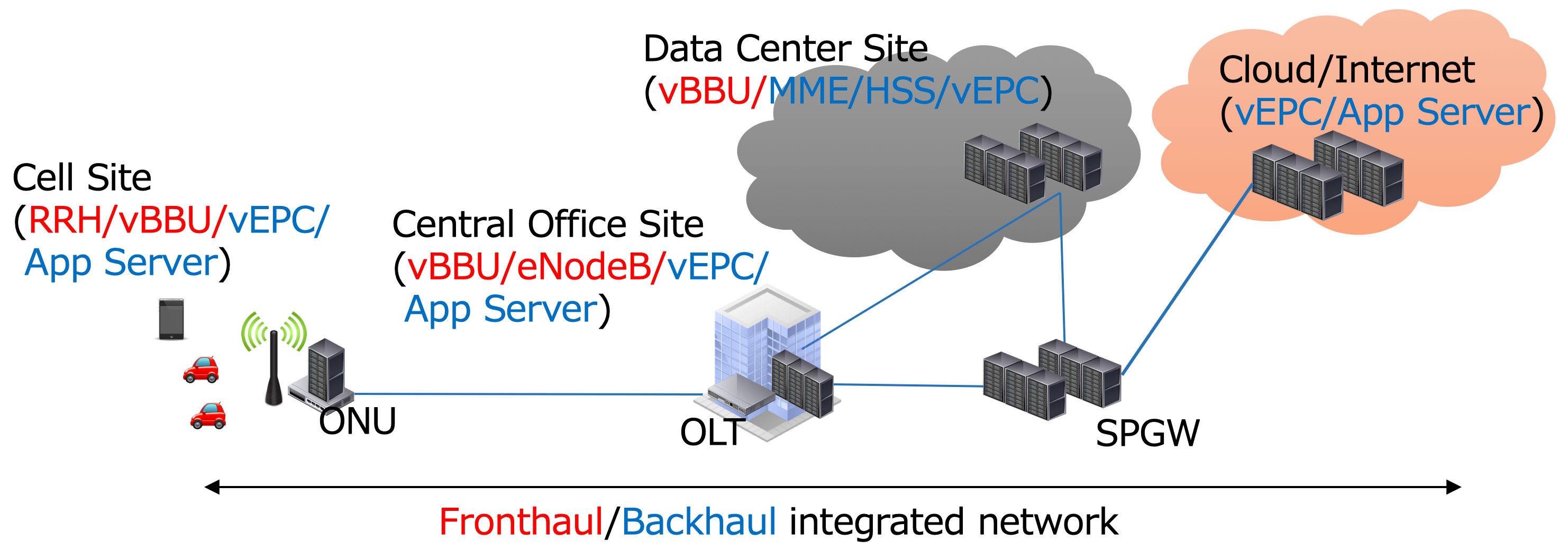
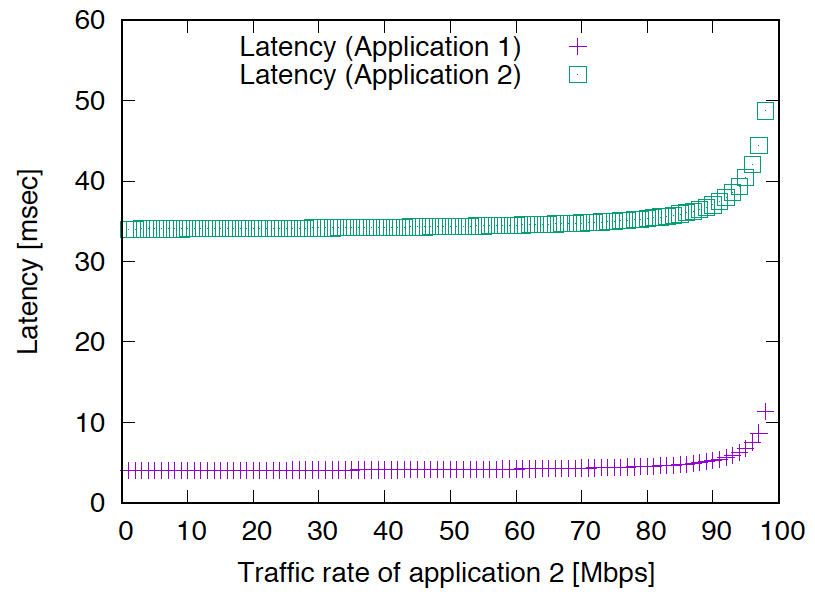
そこで本研究では、フロントホールネットワークとバックホールネットワークの統合制御を前提としたモバイルネットワークに着目し、数学的解析手法に基づいて、その性能評価を行った。具体的には、対象とするネットワークのモデル化を行い、アプリケーショントラヒックのエンド間遅延時間、パケット廃棄率、及びシステム全体の消費電力を導出する解析モデルを構築した。簡素なネットワークを想定した数値評価から、フロントホールとバックホールのネットワーク機能を適切に配置することによって、遅延制約のあるアプリケーショントラヒックのエンド間遅延時間を70%削減できることを明らかにした。
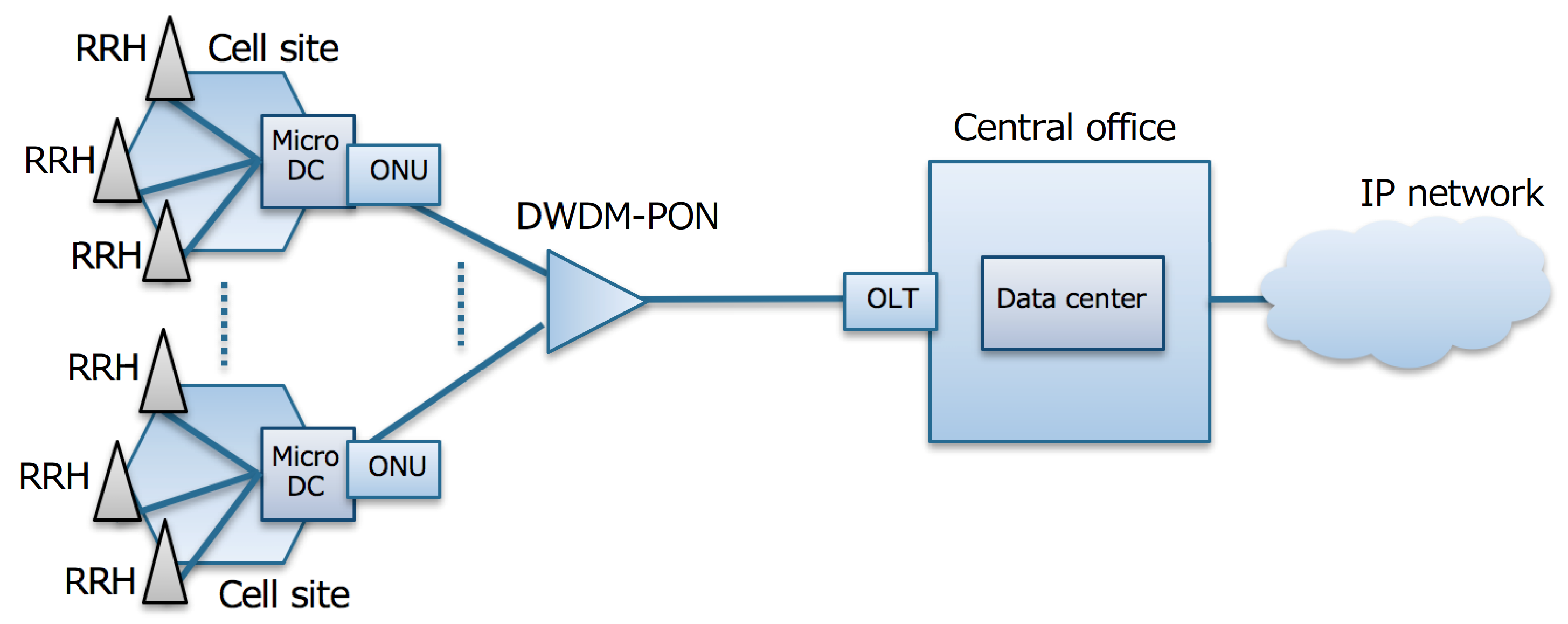
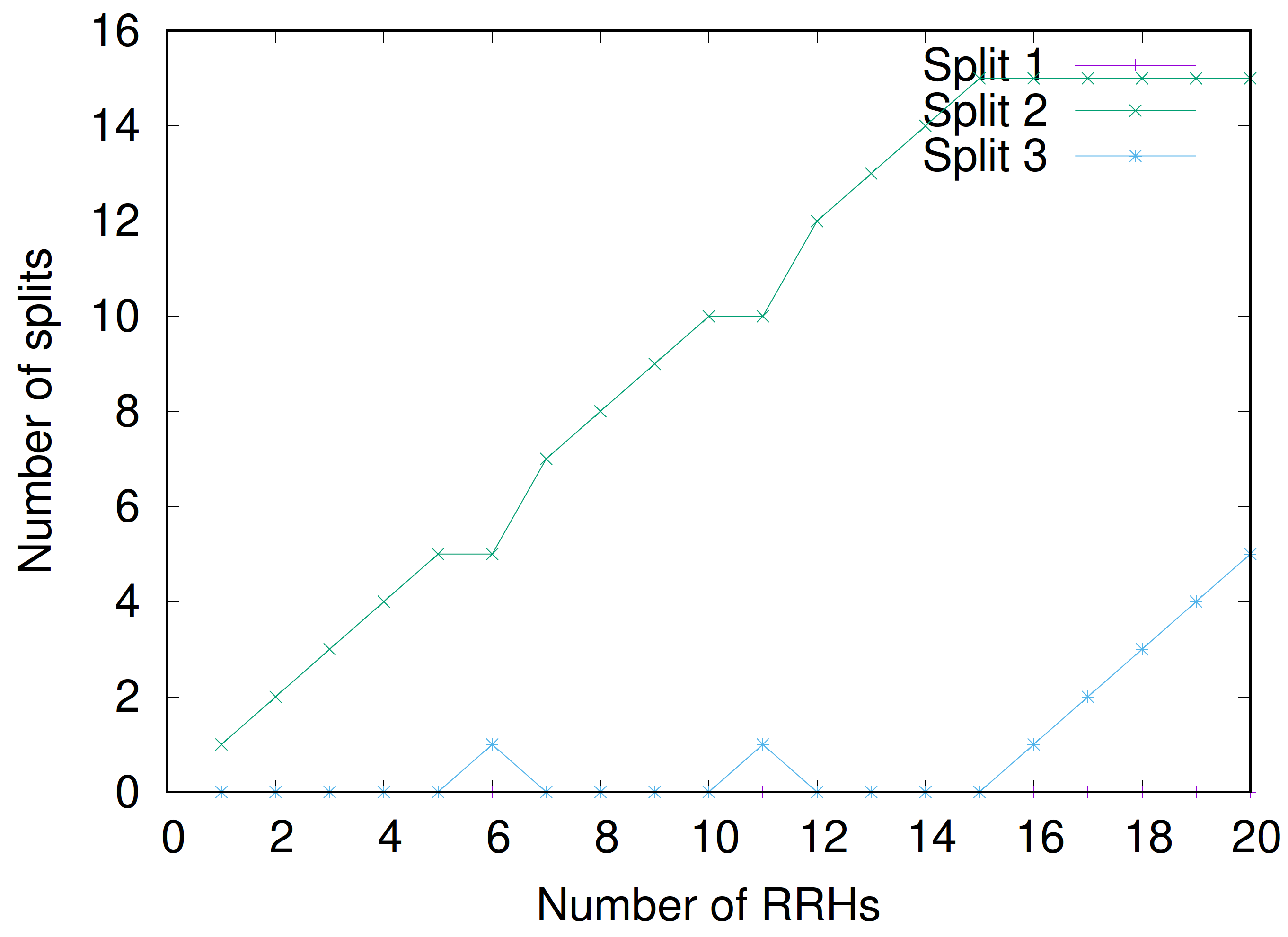
さらに、TWDM-PONを用いて構築される第5世代携帯電話ネットワークのためのフロントホールネットワークを対象に、ベースバンド処理の機能分割の最適化を行うための新たな数学モデルを構築し、最適な機能分割を得るための最適化問題として定式化した。具体的には、TWDM-PONのネットワーク資源量、基地局数、トラヒック量、サーバの消費電力などを考慮して、ベースバンド処理の各レイヤの処理を基地局サイトと局舎サイトで分割して実行することで、システム性能を最適化する最適化問題を定義し、数値例を示し、システムの各パラメータと最適な機能分割との関係を明らかにした。
[関連発表論文]
- Go Hasegawa, Rina Yamasaki and Masayuki Murata, “System and application performance of function placement strategies for virtualized mobile fronthaul/backhaul networks,” in Proceedings of IEEE 23rd Conference on Innovation in Clouds, Internet and Networks (ICIN 2020), February 2020.
- 長谷川剛, 村田正幸, 中平佳裕, 鹿嶋正幸, 阿多信吾, “TWDM-PON に基づくフロントホールネットワークの機能配置の最適化に関する一検討,” 電子情報通信学会技術研究報告(NS2019-95), vol. 119, pp. 35–40, September 2019.
2.3. 実世界とのインタラクションを考慮したIoTネットワーク構成手法に関する研究
2.3.1. ポテンシャル場を用いた実世界表現に基づいたSDI仮想化基盤制御手法(1.1.3項再掲)
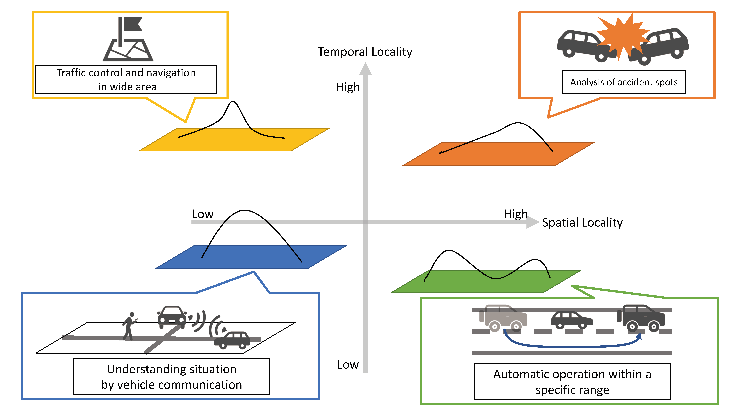
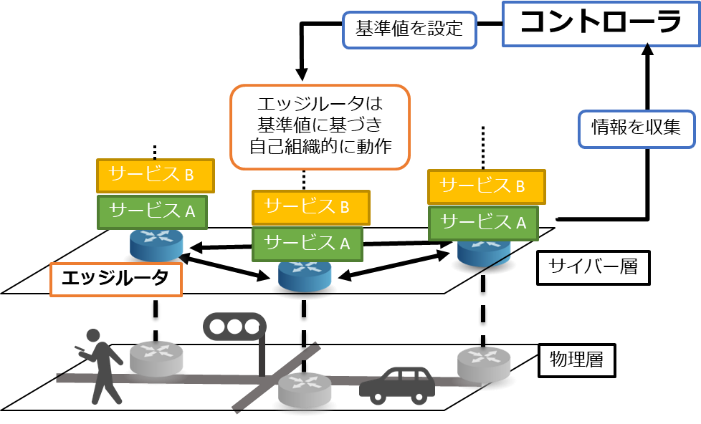
SDI (Software Defined Infrastructure) 環境では、物理的リソースであるコンピューティングリソースとネットワークリソースをスライス化して仮想ネットワークを構築し、その仮想ネットワークをサービススライスとしてユーザに提供する。SDI環境を実現する技術として、近年 SDN (Software-Defined Networks) と NFV (Network Function Virtualization) 技術が着目されている。市場導入に向けては、技術標準化が必須であり、現在も進められているところである。しかし、SDI環境の実現に向けたもう1つの課題は、ユーザの需要に応じて仮想ネットワークと物理的なリソースの割り当てを制御することである。特に最近は、センサーデバイスの小型化や低価格化とモバイルデバイスの普及にともない、現実世界の状況をセンシングして分析処理し新たなサービスを提供する実世界センシングが注目されており、ユーザの需要に応じて高速かつ柔軟にネットワークリソースを制御することが望まれる。
本研究では、SDI環境において、実世界変動に対応しリソース制約も考慮したリソース配置を、ポテンシャル場を用いた自己組織的な動作によって実現する動的リソース制御手法を考案し、計算機シミュレーションを用いて有効性を評価した。提案手法では、各エッジルータに発生する潜在的なリソース需要をポテンシャルとして表現する。エッジルータ間でポテンシャル値の情報交換による自己組織化と外部のコントローラを介したリソース競合の調停管理による管理型自己組織化を行い、ポテンシャル場を形成・更新する。エッジルータ上では複数のサービスが展開されるため、外部のコントローラは各サービスのリソース需要や時空間的特性に基づいて競合するリソースの調停を図る。評価では、交通実データを用いてポテンシャル場を形成および更新し、複数のサービス展開によるリソース競合に対する空間的リソース増強が行われることを明らかにした。また、管理型自己組織化による調停により、リソース不足となるエッジルータの割合が32%低減されることを示した。
[関連発表論文]
- 荒川伸一, 村田正幸, “エッジコンピューティング利活用のための管理型自己組織化リソース制御手法,” 電子情報通信学会総合大会, March 2020.(発表予定).
2.3.2. 脳の情報処理機構に基づく予測型ネットワーク制御技術の確立(NTT ネットワーク基盤技術研究所との共同研究)(1.4.3項再掲)
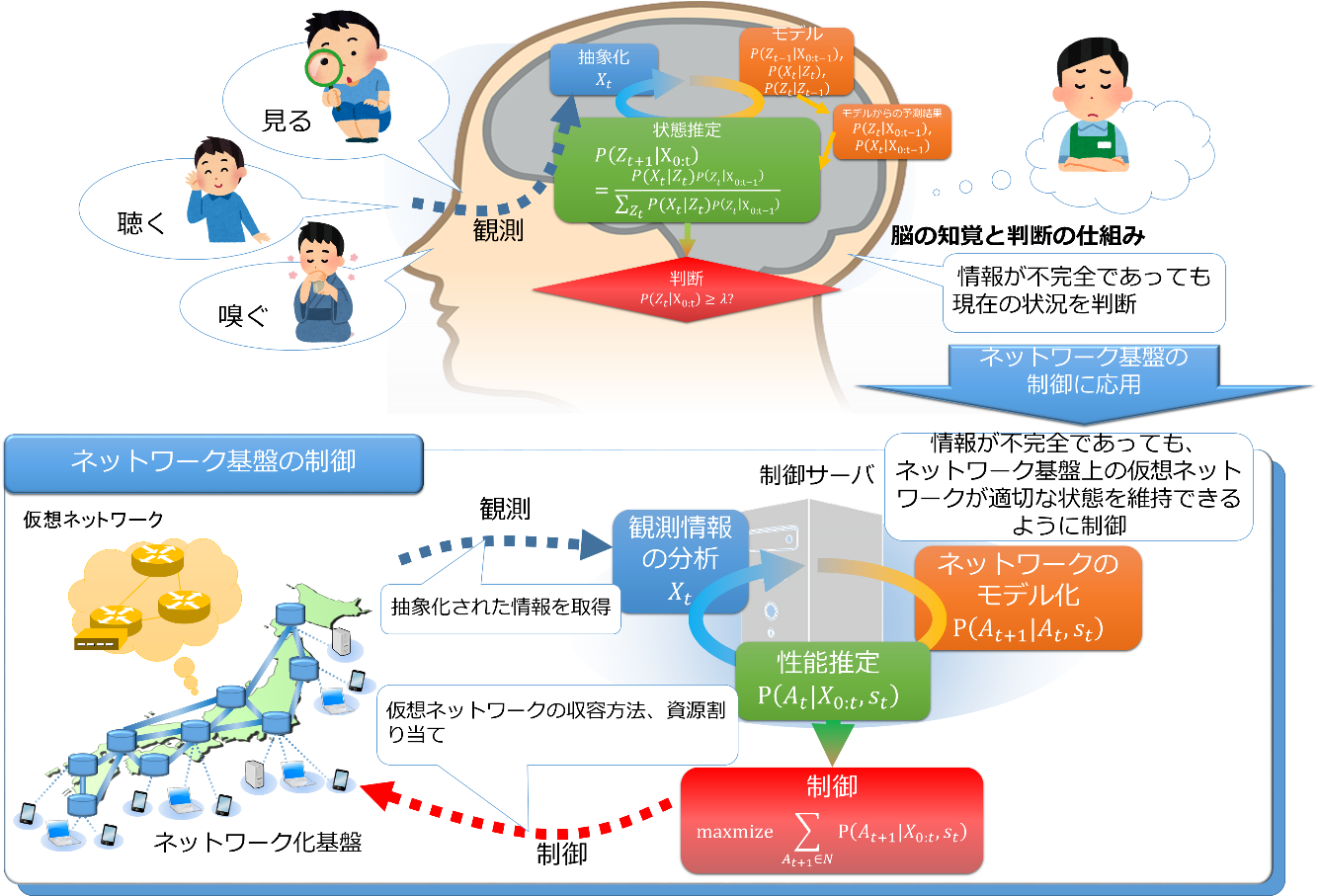
Internet of Things (IoT) デバイスなどの機器の登場とともに、ネットワークを介して提供されるサービスも多様化している。ネットワークには、各サービスが要求する品質を満たすように、各サービスのトラヒックを収容することが求められ、ネットワークスライシング技術の研究が進められている。ネットワークスライシング技術を用いることにより、ネットワークを仮想的に分割し、ネットワークスライスを構築することができる。スライス化されたネットワークでは、各ネットワークスライスへの資源割り当てが重要な課題となる。各ネットワークスライスが収容するトラヒックは、人の行動などの現実世界の状況の影響を受けて時々刻々変化するため、状況に合わせて資源不足をさけるように動的に資源割当制御を行うことが必要となる。動的な資源割当制御のためには、資源不足のリスクを把握する必要があり、資源不足のリスクの把握には、現在ネットワーク内を流れているトラヒック量のみではなく、現実世界の情報を用いることが有効であると考えられる。しかしながら、実世界情報を含む、観測情報と将来とのトラヒック量との関係は一般的にモデル化が困難であり、また、現実世界でセンシングされた情報をもちいる場合、現実世界に配置された多種多様なセンサーのすべてから、短い周期で情報を収集することは困難であると考えられる。
そこで我々は、そのように欠損をふくむ現実世界の情報をもとに資源不足のリスクを把握し、動的な資源割当を行う制御手法の検討を進めている。本検討において、我々は、人の脳が曖昧・不完全な観測情報をもとに認知を行う仕組みにもとづく手法を検討しており、本手法を用いることにより、逐次得られる情報をもとに、資源不足のリスクを判断し、適格に資源割当を行うことを確認している。
[関連発表論文]
- Kodai Satake, Yuichi Ohsita, and Masayuki Murata, “Predictive traffic engineering incorporating re-al-world information inspired by the cognitive process of the human brain,” in Proceedings of Interna-tional Conference on ICT Convergence, pp. 543-548, October 2019.
- 大下裕一, 村田正幸, “将来の状況の予測に基づくネットワーク制御技術,” 電子情報通信学会誌, vol. 102, pp. 860–865, October 2019.
- 安世民, 大下裕一, 村田正幸, “脳の認知機能モデルを用いた交通流センシング情報に基づくネットワーク内資源配分制御の評価,” 電子情報通信学会情報ネットワーク研究会 (IN2019-135), March 2020.
- 安世民, 大下裕一, 村田正幸, “脳の認知機能モデルを用いた複数ネットワークスライスへの資源割り当て制御,” 第18 回情報科学技術フォーラム (FIT2019) 一般講演論文集, September 2019.
2.3.3. 無線ネットワークを経由したロボットの遠隔制御に関する研究(一部、NECシステムプラットフォーム研究所との共同研究)
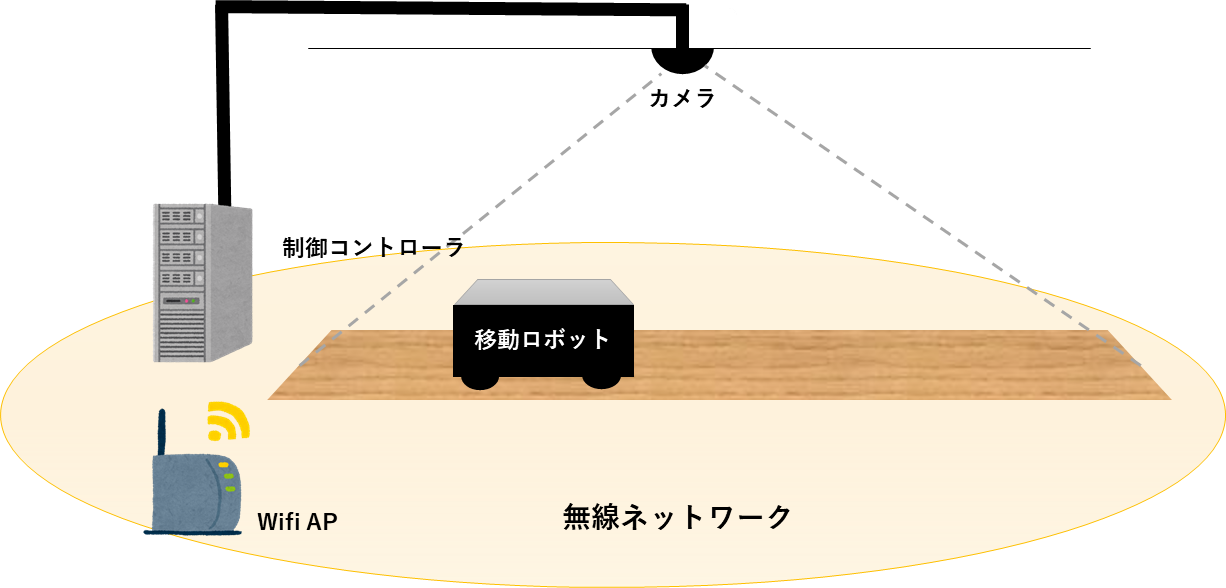
近年、ドローン、災害救助ロボット、無人搬送車など、ネットワーク経由で制御可能なロボットが注目を集めており、様々な手法が研究されている。それらの機器では、ネットワークを経由することにより、作業を行う領域に人が立ち入ることなく、作業が可能となる。ネットワーク経由で操作する機器においては、ネットワークの遅延が大きな問題となる。そのような機器を効率的に動作させるためには、遅延分先の実際に制御が行われる状況を予知し、その状況に合わせた制御を行うことが求められる。
我々は、特に、ロボットが動作する環境におけるロボットの状態を監視するセンサーが配置されている状況下において、無線ネットワーク経由でロボットを制御するためのアーキテクチャの検討を行っている。この環境では、環境センサーと有線接続されたコントローラでは、短い遅延でロボットの状況を観測できるものの、無線ネットワーク経由で行われるコントローラ・ロボット間の通信は、大きな遅延が生じ、また、遅延の変動も大きい。本研究では、この環境下において、ロボットを的確に制御するためのコマンド送出方法に関する研究や、ネットワークやロボットの動作環境の把握・予測と連携した制御手法に関する研究を進めている。
[関連発表論文]
- 松田拓己, 大下裕一, 村田正幸, “移動ロボットの遠隔制御におけるベイズ推定を用いた環境同定手法の提案と実装,” 電子情報通信学会情報ネットワーク研究会(NS2019-85), March 2020.
- 大下裕一, 安田真也, 熊谷太一, 吉田裕志, 金友大, 村田正幸, “通信状況が不安定な環境下における予測に基づく複数制御コマンド同時送信によるロボットの遠隔制御,” 電子情報通信学会ネットワークシステム研究会(NS2019-84), March 2020.
- Takumi Matsuda, “Mobile robot control through real-time identification of physical/network environ-ment by Bayesian inference,” Master’s thesis, Graduate School of Information Science and Technology, Osaka University, February 2020.